
Publications
Filter by
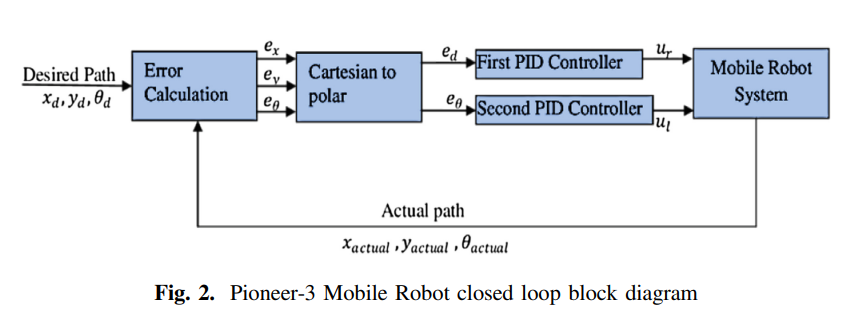
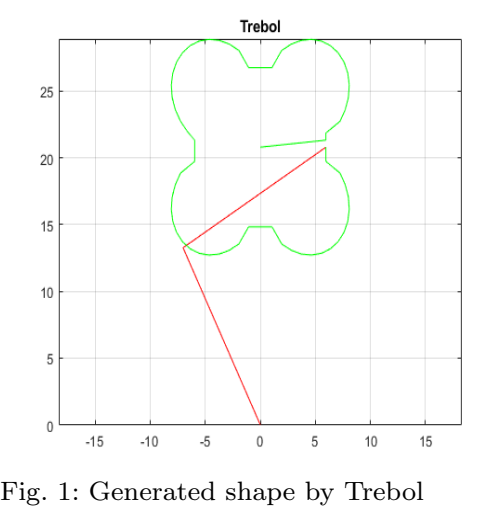
Robust Path Tracking of Mobile Robot Using Fractional Order PID Controller
This paper represents the control of the Pioneer-3 Mobile Robot as a complex non-linear system which provides an object for research nonlinear system kinematics and dynamics analysis. In this paper, the system modeling and simulation is divided into two main parts. The first part is the modeling and simulation using MATLAB and the second part is the whole mechanical design and its characteristics
Optimal Design of PID Controller for 2-DOF Drawing Robot Using Bat-Inspired Algorithm
Tuning process which is used to find the optimum values of the proportional integral derivative (PID) parameters, can be performed automatically using meta-heuristics algorithms such as BA (Bat Algorithm), PSO (Particle Swarm Optimization) and ABC (Artificial Bee Colony). This paper presented a theoretical and practical implementation of a drawing robot using BA to tune the PID controller
PID Controller for 2-DOFs Twin Rotor MIMO System Tuned with Particle Swarm Optimization
This paper presents the modelling and control of a 2-DOFs Twin rotor multi input multi output (MIMO) system which is a laboratory setup resembling the dynamics of a helicopter. In this paper, the system modelling process is done using the common conventional mathematical model based on Euler-Lagrange method. The transfer functions of the model are used in the different tuning methods to reach the
Steering Control for Autonomous Vehicles Using PID Control with Gradient Descent Tuning and Behavioral Cloning
In this paper we implement and evaluate two ways of controlling the steering angle of an autonomous vehicle, PID control with manual tuning followed by gradient descent algorithm tuning-which is able to enhance the performance through self-adjusting the controller parameters-and using supervised machine learning through the end-to-end deep learning for self-driving car which implement
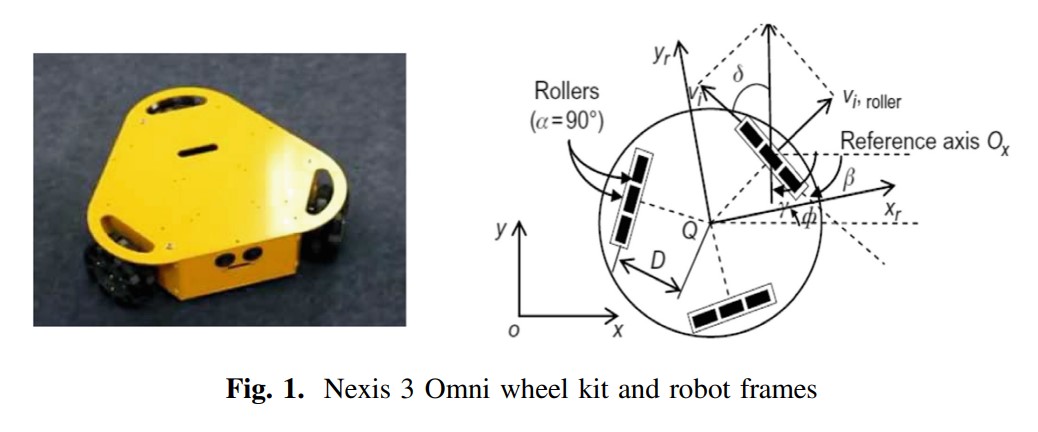
Path Planning Control for 3-Omni Fighting Robot Using PID and Fuzzy Logic Controller
This paper addresses a comparison between some control methods of three Omni wheels firefighting robot due to the variety of maneuverability. To achieve path planning for firefighting robot to reach a specific point with the shortest path, a kinematics model of omni wheel robot is applied with some control algorithms based on PID controller, Fuzzy logic controller and self-tuned PID using fuzzy
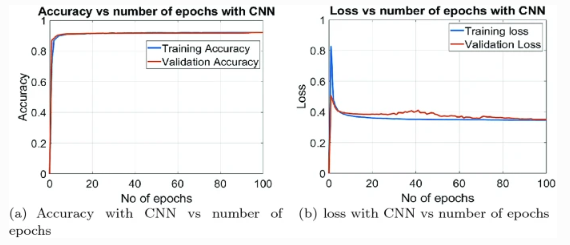
Solving Inverse Kinematics of a 7-DOF Manipulator Using Convolutional Neural Network
This paper presents a way to solve inverse kinematics of a 7-DOF manipulator using artificial neural networks. The manipulator consists of a 6-DOF articulated arm installed on a linear guide system to increase the workspace of the robot. The purpose of this paper is to provide an alternative to the traditional and complicated way to solve inverse kinematics by using artificial neural networks. The
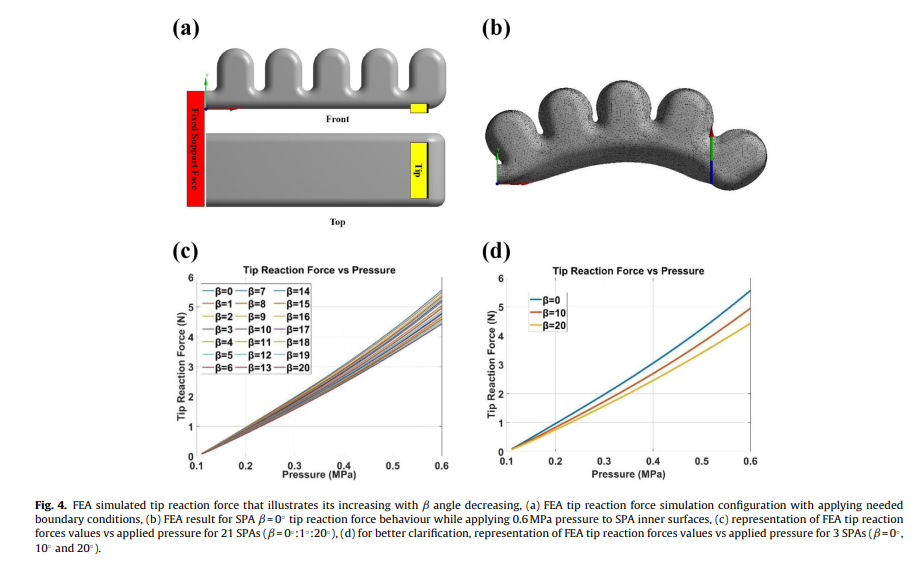
Design and implementation of variable inclined air pillow soft pneumatic actuator suitable for bioimpedance applications
The technological revolution has caused the modernization of human–machine relationship changing our approach in problem solving our society issues and deviated the science of robotic all together. An example for one of the most important pawn in this revolution is soft robotics, the soft robots are robots that are made of deformable materials that provide an alternative approach to rigid robots

A Neuro-Fuzzy Based Approach for Energy Consumption and Profit Operation Forecasting
In recent years, the massive growth in the scale of data is being a key factor in the needed data processing approaches. The efficiency of the algorithms of knowledge extraction depends significantly on the quality of the raw data, which can be improved by employing preprocessing techniques. In the field of energy consumption, the forecasting of power cost needed plays a vital role in determining
Self-Driving Car Lane-keeping Assist using PID and Pure Pursuit Control
Detection of lane boundaries is the primary role for monitoring an autonomous car's trajectory. Three lane identification methodologies are explored in this paper with experimental illustration: Edge detection, Hough transformation, and Birds eye view. The next step after obtaining the boundary points is to add a regulation rule to effectively trigger the regulation of steering and velocity to the

Prediction of the Hitec Molten Salt Convective Heat Transfer Performance Using Artificial Neural Networks
Hitec molten salt is a ternary eutectic mixture salt that is used as an energy storage medium in concentrated solar power plants to improve the system performance and reduce the operational cost. Thus, the heat transfer performance represented in Nusselt number has been investigated numerically under different inlet temperature and velocity conditions with constant uniform side heat flux. Also