
Publications
Filter by

Modeling and control of 3-omni wheel Robot using PSO optimization and Neural Network
Omni mobile robots are one of the mobile robots that interact with humans in many areas where it is needed to be collaborative and accurate. Committing robotics with artificial intelligence-based controllers became nowadays mandatory for more association of these robots with distinct environments. This paper proposes the distinction of the 3WD Omni Vision feedback model between Simscape and actual
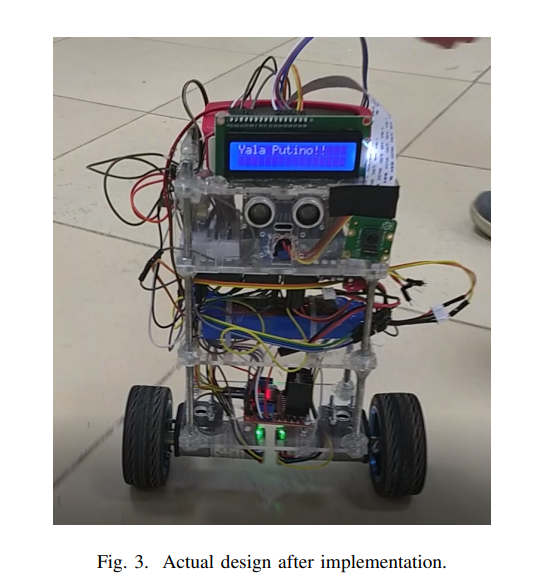
Hybrid Self-Balancing and object Tracking Robot Using Artificial Intelligence and Machine Vision
Over the past decade, mobile autonomous robots have been widely used efficiently for different applications. Recently, self-balancing robots attracted more attention and showed impressive performance. A self-balancing robot is simply a two-wheeled robot; hence it needs to be balanced vertically using a closed-loop control algorithm. In this paper, a new hybrid two-wheeled self-balancing robot is
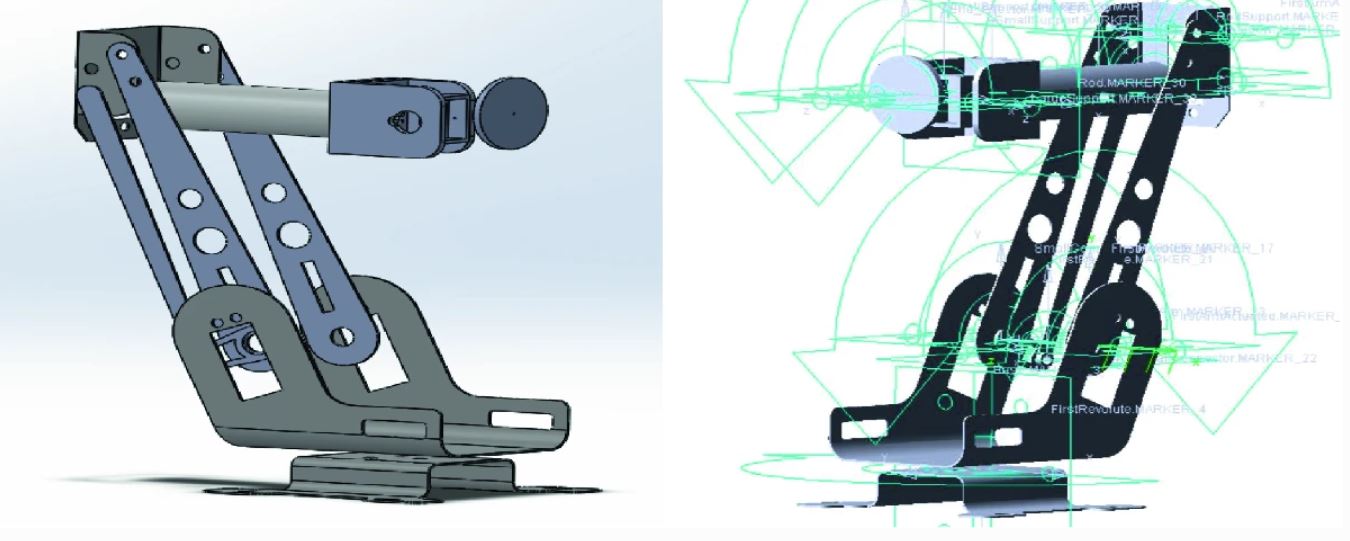
Experimental Kinematic Modeling of 6-DOF Serial Manipulator Using Hybrid Deep Learning
According to its significance, robotics is always an area of interest for research and further development. While robots have varying types, design and sizes, the six degrees of freedom (DOF) serial manipulator is a famous robotic arm that has a vast areas of applications, not only in industrial application, but also in other fields such as medical and exploration applications. Accordingly

Tuning of PID Controller Using Particle Swarm Optimization for Cross Flow Heat Exchanger Based on CFD System Identification
This paper illustrates the design of proportional–integral–derivative controller (PID) controller of 10 KW air heaters for achieving the set point temperature as fast as possible with minimum response overshoot. Computational fluid dynamic (CFD) numerical simulations are utilized to predict the natural response of 10 KW input power for the air heater. CFD results are validated with experimental
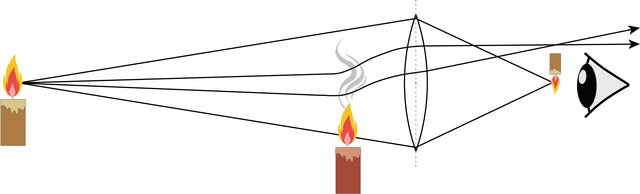
Design of a Schlieren System for Visualization of Heat and Mass Transfer
In this contribution, a simple yet effective design for Schlieren photography system is described and implemented. The proposed system is used in the visualization of both heat and mass transfer phenomena. Refractive index gradient is created by a lighter to study mass transfer, then the lighter is ignited to create temperature gradient. Results show the ability of the proposed system in capturing
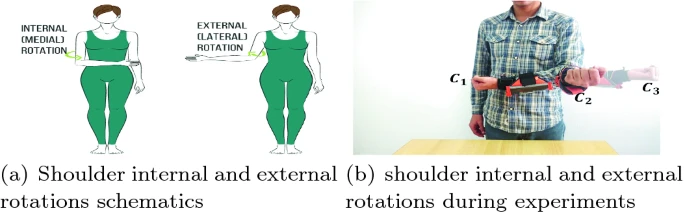
Classifying Upper Limb Activities Using Deep Neural Networks
This paper presents a classification method using Inertial Measurement Unit (IMU) in order to classify six human upper limb activities. The study was also carried out to investigate whether theses activities are being performed normally or abnormally using two different neural networks: Artificial neural network (ANN) and convolutional neural network (CNN). Human activities that were included in

Centralized Multi-agent Mobile Robots SLAM and Navigation for COVID-19 Field Hospitals
In this paper we focus on the proof of concept prototype of fully autonomous centralized Multi-Robot System (MRS) consisting of a Hexapod walking robot and a six wheeled mobile robot. Recently, there has been an increasing demand for such systems as they can be involved in several tasks such as collaborative search and rescue, surveillance, monitoring, and disinfecting Field hospitals. To name a

Controller Design and Optimization of Magnetic Levitation System (MAGLEV) using Particle Swarm optimization technique and Linear Quadratic Regulator (LQR)
Magnetic Levitation System is one of practical examples which faces some nonlinearities behavior. Such systems require special types of controller parameters consideration for accurate results. In this paper, the process of tuning is to determine the system poles and getting them away from the instability region using state feedback (SF) controller methodology. The resulted controllable system
Numerical investigation of hematocrit variation effect on blood flow in an arterial segment with variable stenosis degree
Numerical simulations of blood flow in arteries are important in the understanding and diagnosis of many cardiovascular diseases, such as atherosclerosis and arterial stenosis. More realistic mathematical models representing blood rheology offer a better understanding of these diseases. In this study, blood is considered an Oldroyd-B fluid with a shear-thinning property and a shear rate-dependent
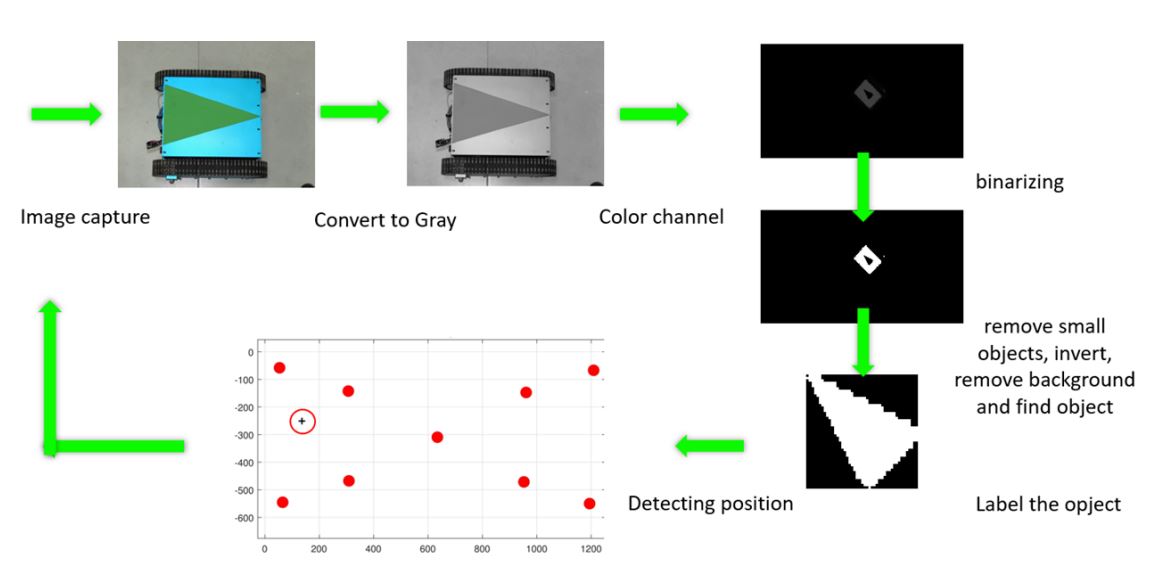
Experimental Path tracking optimization and control of a nonlinear skid steering tracked mobile robot
The skid steering tracked robot is consider one of the famous robots that used in the autonomous agricultural field. The robot model is considered as a coupled nonlinear model. So, a real kinematic model is required to develop the robot motion which will improve the high quality and quantity of the cultivated crops. So, in this research a mathematical model for the skid steering mobile robot (SSMR