

Publications
Filter by
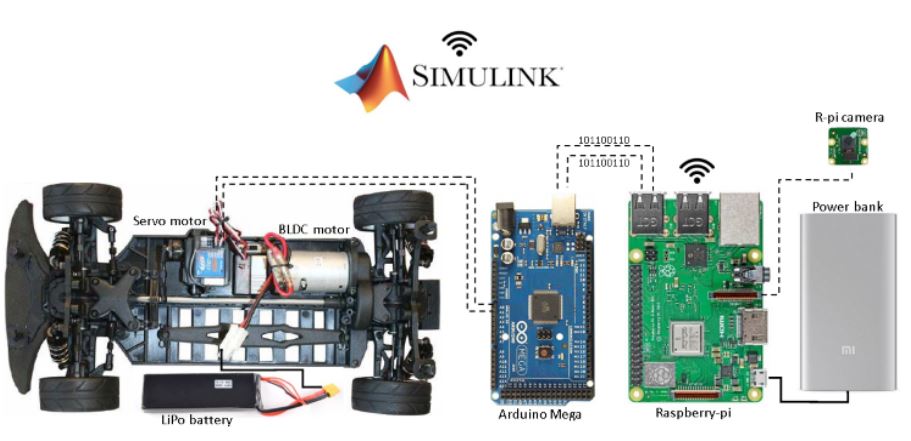
Experimental Lane Keeping Assist for an Autonomous Vehicle Based on Optimal PID Controller
Detection of the lane boundary is the primary task in order to control the trajectory of an autonomous car. In this paper, three methodologies for lane detection are discussed with experimental illustration: Blob analysis, Hough transformation and Birds eye view. The next task after receiving the boundary points is to apply a control law in order to trigger the steering and velocity control to the

Gray Wolf Optimization of Fractional Order Control of 3-Omni Wheels Mobile Robot: Experimental Study
Committing robotics with artificial intelligence becomes mandatory collaboration with distinct environments. Omnidirectional Wheeled (Omni-WD) mobile robots are one of the robots that interact with humans in various circumstances, where it is important to function effectively and accurately. In this paper, the distinction of a 3WD-Omni model and control using machine vision is demonstrated. The
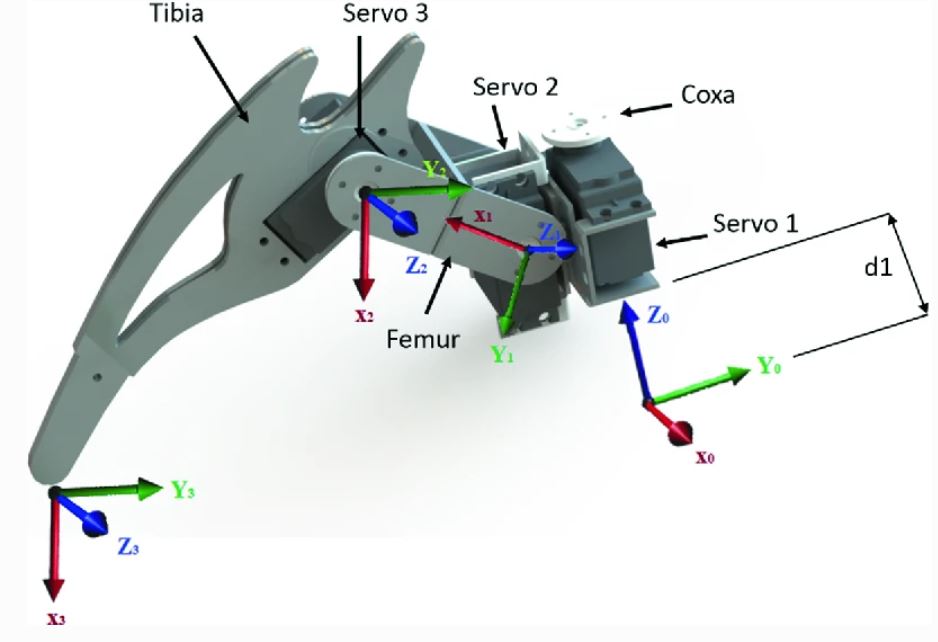
Experimental Modeling of Hexapod Robot Using Artificial Intelligence
Hexapod Robots gave us the opportunity to study walking robots without facing problems such as stability and expensive custom made hardware. It has a great deal of flexibility in moving over different terrains even if some legs become malfunctioned or facing some difficulties in movement. In this study the kinematic analysis of CH3-R 18DOF Hexapod Robot is discussed where each leg contains three
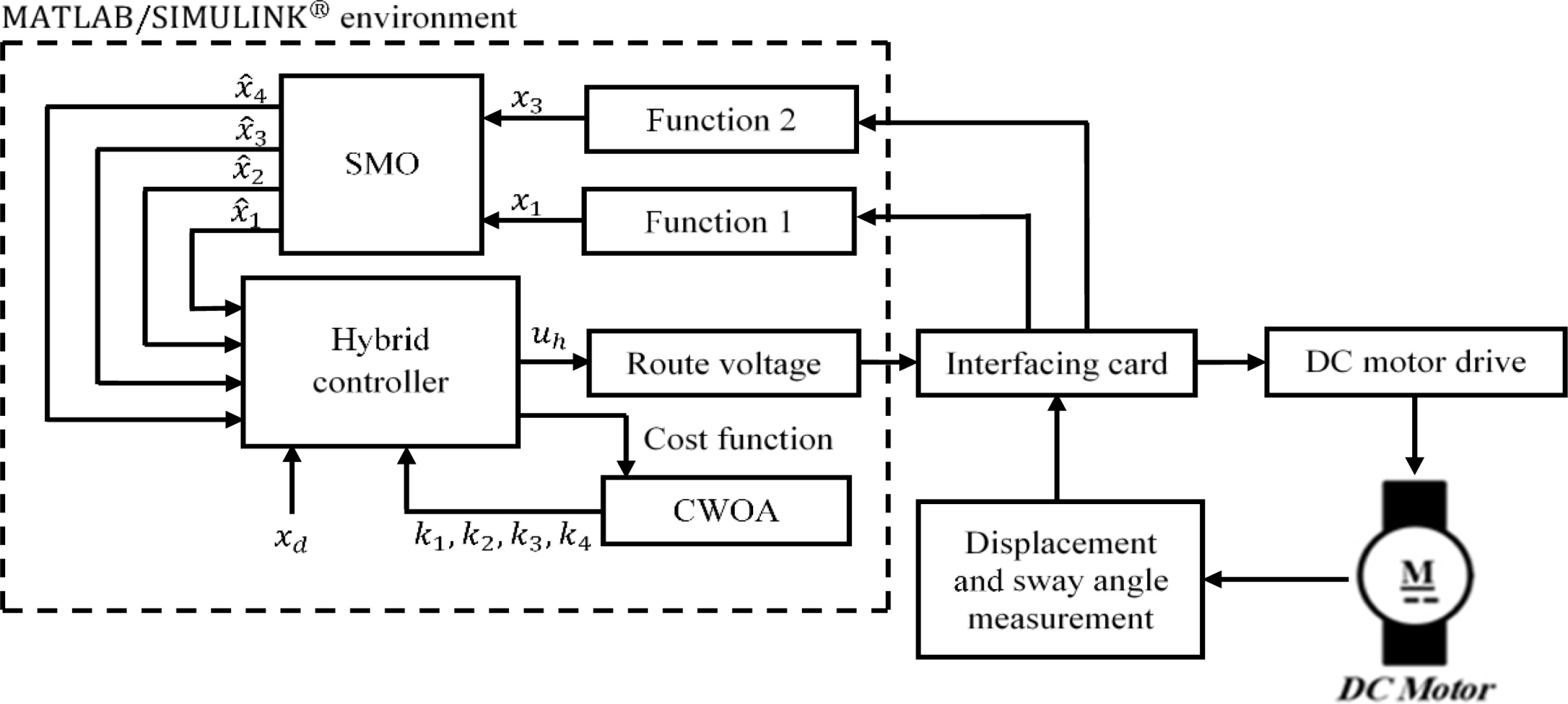
Experimental verification of a hybrid control scheme with chaotic whale optimization algorithm for nonlinear gantry crane: A comparative study
This paper proposes an experimental verification of a hybrid partial feedback linearization (PFL) and deadbeat (DB) control scheme as in Hamdy et al. (2018) with chaotic whale optimization algorithm (CWOA) for a nonlinear gantry crane (GC) system. The PFL linearizes the nonlinear model to end up with a linear closed-loop system. The DB controller is utilized for the desirable accelerated response
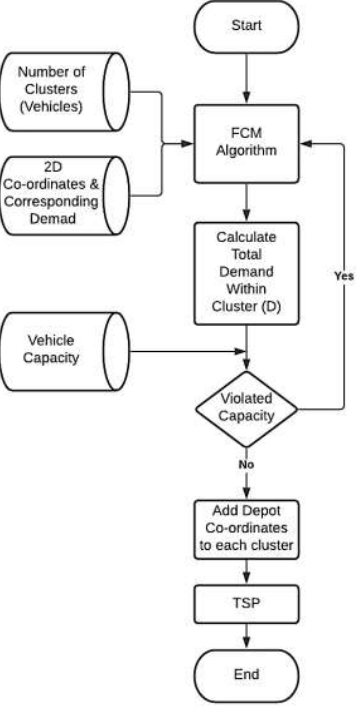
Modified fuzzy c-means clustering approach to solve the capacitated vehicle routing problem
Fuzzy C-Means clustering is among the most successful clustering techniques available in the literature. The capacitated vehicle routing problem (CVRP) is one of the most studied NP-hard problems. CVRP has attracted the attention of many researchers due to its importance within the supply chain management field. This study aims to develop a fuzzy c-means clustering heuristic to efficiently solve

FCM-based approach for locating visible videowatermarks
The increased usage demand for digital multimedia has induced significant challenges regarding copyright protection, which is the copy control and proof of ownership. Digital watermarking serves as a solution to these kinds of problems. Among different types of digital watermarking, visible watermarking protects the copyrights effectively, since the approach not only prevents pirates but also
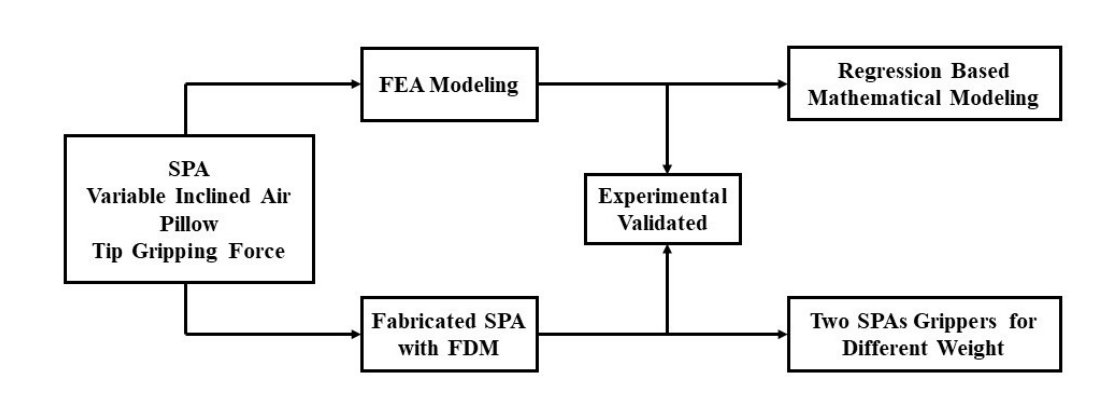
Gripping Force Modeling of a Variable Inclined Air Pillow Soft Pneumatic Actuator
Soft pneumatic actuators grasping tasks is one of the essential rules in robot manipulation methods. The grasping forces can be adapted to handle delicate and hard objects without leaving any damages on the object surfaces. This paper investigates the influence of the inclination angle of the soft pneumatic actuator (SPA) on its gripping force at its end tip. A range of inclination angles for SPA
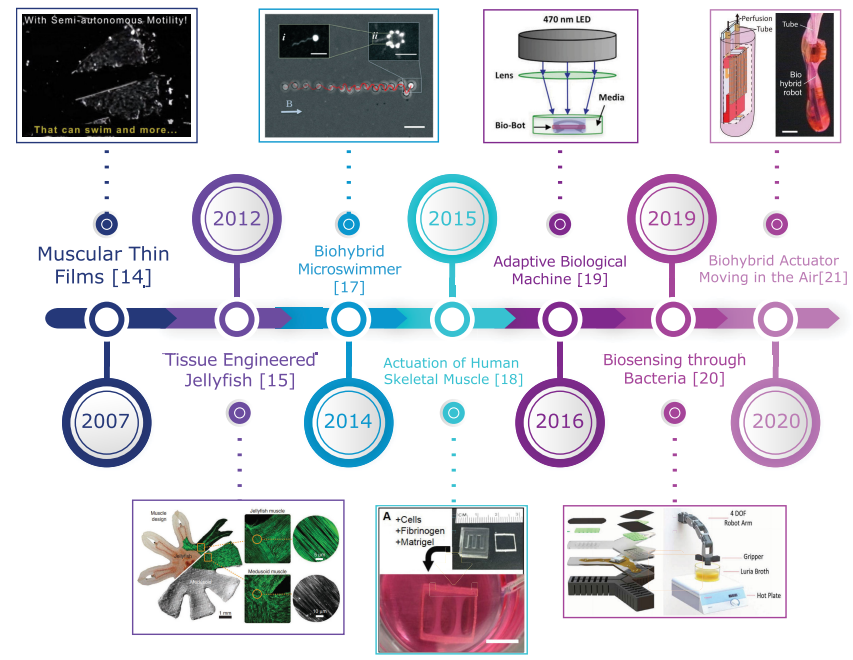
Biohybrid soft robots, E-skin, and bioimpedance potential to build up their applications: A review
Soft Robotics is a new approach towards better human-robot interaction and biomimicry in the robotics field. Its integration with biological materials (Biohybrid soft robotics) is one of the topics being focused on in the soft robotics research in the last fifteen years. The motive for this approach is to combine the best of biological and artificial systems. In this article, Biohybrid soft robots
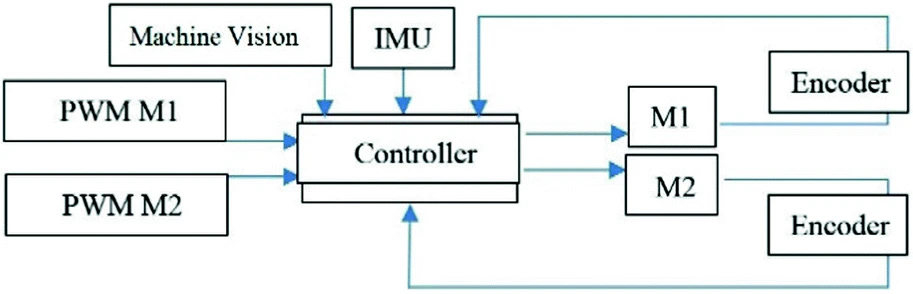
Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool

A Hybrid Deep Learning Based Autonomous Vehicle Navigation and Obstacles Avoidance
Technological revolution has reached all life activities starting from day planning reaching communication, entertainment, industry, and transportation. Each of previously mentioned categories get improved in a way making human life easier and safer. In the use of automatic control, several researches focused on automating vehicles’ systems to make driving easier and safer. The availability of