
Publications
Filter by

Metaheuristic Optimization of Fractional Order Incremental Conductance (FO-INC) Maximum Power Point Tracking (MPPT)
This paper seeks to improve the photovoltaic (PV) system efficiency using metaheuristic, optimized fractional order incremental conductance (FO-INC) control. The proposed FO-INC controls the output voltage of the PV arrays to obtain maximum power point tracking (MPPT). Due to its simplicity and efficiency, the incremental conductance MPPT (INC-MPPT) is one of the most popular algorithms used in

Numerical simulation of blood flow in abdominal aortic aneurysms: Effects of blood shear-thinning and viscoelastic properties
In this study numerical simulation of blood flow in abdominal aortic aneurysms is presented. The novelty in this study is the consideration of the blood viscoelastic properties to account for the presence of red blood cells in addition to the shear-thinning behavior. The Oldroyd-B model is used to account for the viscoelasticity while the Carreau–Yasuda model is used to represent the shear

Two-wheeled Self balancing robot Modeling and Control using Artificial Neural Networks (ANN)
This paper is focusing on the problem of the Self balancing robot which has many potentials due to its power consumption and maneuverability advantages. Modelling and controlling of the two-wheeled self-balancing robot is presented. For modelling part, two models were used in compare with a real proposed robot. At first, mathematical model was driven and the state space was achieved to model the

Modelling of Continuum Robotic Arm Using Artificial Neural Network (ANN)
Continuum robotic arm becomes the new area of scientific research nowadays. Its technology has grown and touched several vital applications included industry and agriculture thanks to many advantages made it a better choice than the conventional serial robotic manipulator. This paper represents a new designed model of continuum arm robot, which relates the motor shaft angle as the input parameter

Effect of the wall thermal boundary condition on the structure of a confined swirling diffusion flame
The present study focuses on the effect of the wall heat loss on a confined swirling diffusion flame. The objective is to assess the effect of changing the wall thermal boundary condition (i.e., from isothermal to adiabatic) on the flow structure, the flame shape, and the mixing behavior. Reynolds-averaged Navier–Stokes equations are solved. The diffusion flamelet model is employed in the
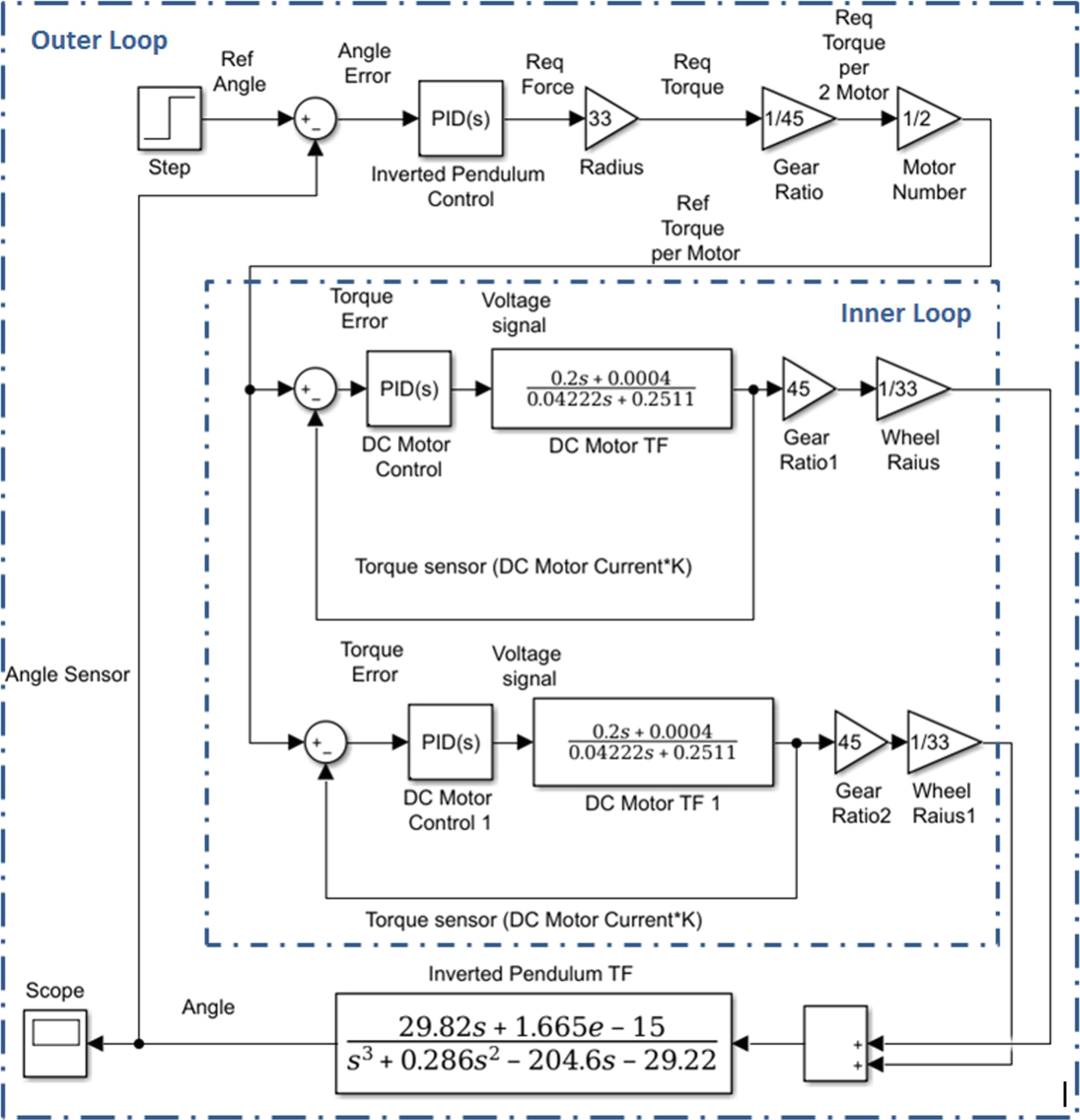
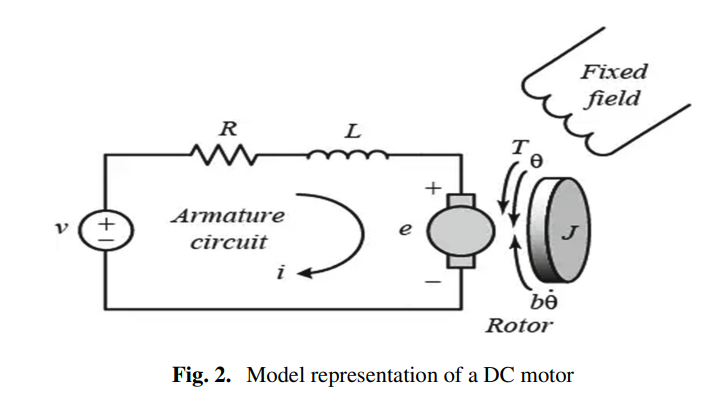
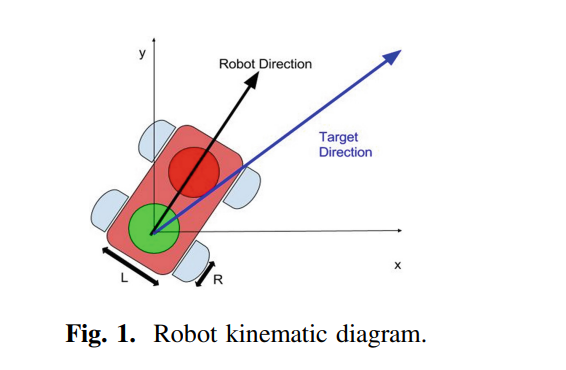
Self-balancing Robot Modeling and Control Using Two Degree of Freedom PID Controller
This paper represents the control of a two-wheel self-balancing robot based on the theory of controlling the inverted pendulum. This paper dividing the system modeling into two main parts. The first part is the dc motor and the second part are the whole mechanical design and its characteristics as a function in the motor speed and the torque depending on the system, creating two control closed
Fuzzy Logic Controller with Color Vision System Tracking for Mobile Manipulator Robot
The purpose of this article is to present a theoretical and practical implementation of a fuzzy algorithm methodology to control a mobile manipulator path planning using a real-time vision system tracking. To meet high performance response and robust stability of the platform navigation, a fuzzy logic controller is designed with realistic constrains. OpenCV library is used to implement Background
Design and Implementation of Fuzzy PID Controller into Multi Agent Smart Library System Prototype
This paper compares the performance of four different controllers implemented on two multi agent robots to stabilize its motion from one station to another during delivery tasks. The controllers are; multi-position controller, PID controller, fuzzy logic controller and fuzzy-PID controller. The aim of this paper is to control the mobile robot robustly to arrive its target destination. The robots

A Hydro-Kinematic approach for the design of compact corrugated plate interceptors for the de-oiling of produced water
A Hydro-Kinematic approach is proposed for the design of compact corrugated plate interceptors (CPIs) for the de-oiling of produced water. For a given set of design targets of a specific flow rate, maximum retention time and minimum captured oil droplet diameter, the Hydro-Kinematic approach proposes a systematic way to determine the CPI unit dimensions and operating conditions with the minimum