

Fabrication of bio-plastic composite pellets from agricultural waste and food waste
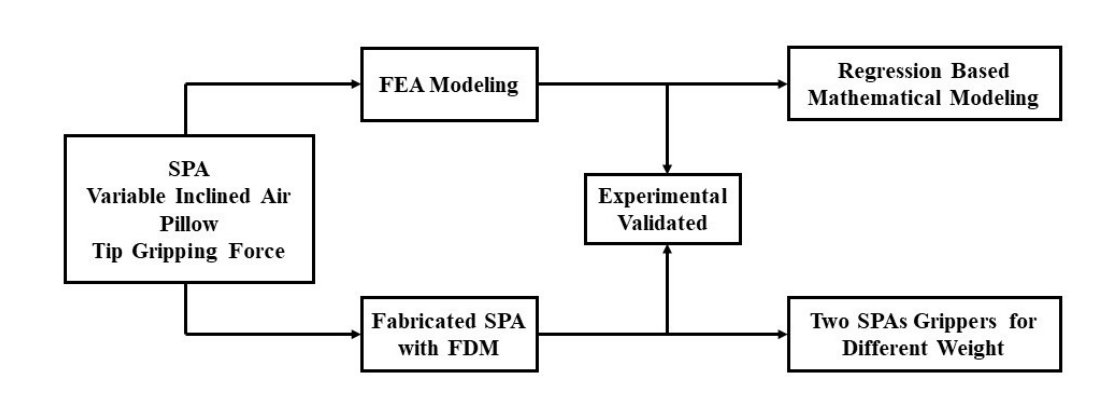
Gripping Force Modeling of a Variable Inclined Air Pillow Soft Pneumatic Actuator
Soft pneumatic actuators grasping tasks is one of the essential rules in robot manipulation methods. The grasping forces can be adapted to handle delicate and hard objects without leaving any damages on the object surfaces. This paper investigates the influence of the inclination angle of the soft pneumatic actuator (SPA) on its gripping force at its end tip. A range of inclination angles for SPA is analyzed using Finite Element Analysis (FEA) to estimate the gripping force at the end tip regarding SPA inner faces pressure. FEA study is conducted based on Hyperelastic material modeling

Fractional Order Two Degree of Freedom PID Controller for a Robotic Manipulator with a Fuzzy Type-2 Compensator
In this paper a novel strategy for the position control and trajectory tracking of robotic manipulators is proposed. This strategy consists of an independent two degree of freedom PID controller for a two links robotic arm. Due to the capability of two degree of freedom PID controllers to deal with disturbances, each link is controlled independently considering that the disturbance does not affect the system performance due to the robustness of the closed loop system. Then, a fuzzy type-2 centralized compensator is implemented to drive the orientation variables with the desired trajectory in

Gray Wolf Optimization of Fractional Order Control of 3-Omni Wheels Mobile Robot: Experimental Study
Committing robotics with artificial intelligence becomes mandatory collaboration with distinct environments. Omnidirectional Wheeled (Omni-WD) mobile robots are one of the robots that interact with humans in various circumstances, where it is important to function effectively and accurately. In this paper, the distinction of a 3WD-Omni model and control using machine vision is demonstrated. The use of fractional order (FO) calculus has been stated to increase the degrees of freedom of the controller over the integer ones. Hybridization of FO control and metaheuristics optimization is reported
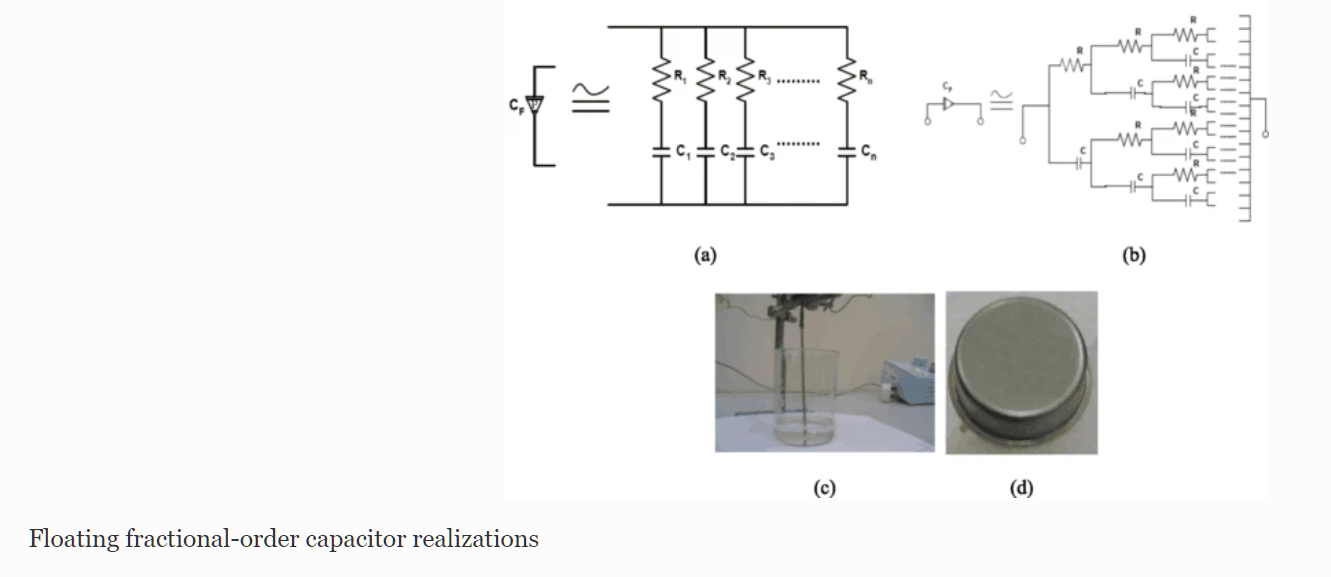
Optimization of fractional-order RLC filters
This paper introduces some generalized fundamentals for fractional-order RL β C α circuits as well as a gradient-based optimization technique in the frequency domain. One of the main advantages of the fractional-order design is that it increases the flexibility and degrees of freedom by means of the fractional parameters, which provide new fundamentals and can be used for better interpretation or best fit matching with experimental results. An analysis of the real and imaginary components, the magnitude and phase responses, and the sensitivity must be performed to obtain an optimal design