

Guest editorial mission critical networking
[No abstract available]

A Heterogeneous Vehicle Routing Problem with Soft Time Windows for 3PL Company's Deliveries: A Case Study
Route optimization is tactically important for companies that must fulfill the demands of different customers with fleet of vehicles, considering multiple factors like: The cost of the resources (vehicles) involved and the operating costs of the entire process. As a case study, a third-party logistics service provider, ABC Company, is introduced to implement optimization on. Furthermore, ABC Company's problem is defined as route optimization and load consolidation problems that will be solved as heterogeneous vehicle routing problem with soft time windows (HVRPSTW). In this paper's case

Modelling Three Dimensional Unsteady Turbulent HVAC Induced Flow
The number of words should not exceed 350. A three-dimensional numerical model for HVAC induced flow is presented. The nonlinear set of buoyancy driven incompressible flow equations, augmented with those of energy and k-ϵ turbulence model is solved. Various relevant are discussed. These challenges include avoiding expensive commercial packages, modelling complex boundaries, and capturing near wall gradients. Adaptive time stepping is employed to optimize computational effort. Threedimensional simulation requirements are addressed using parallel computations. Twodimensional and three

Equation of state for cosmological matter at and beyond QCD and electroweak eras
Various thermodynamic quantities for baryon-free matter are calculated by combining the most reliable non-perturbative and perturbative calculations, especially the most recent ones including as many quark flavors as possible. We extend these calculations by including other degrees of freedom (dof), such as photons, neutrinos, leptons, electroweak particles and Higgs bosons, which allows us to consider temperatures up to the TeV-scale. The calculations show that similar to QCD, the EW phase transition is also a crossover. We have found that while the equation of state for the hadronic matter
A Stress Mapping Immersed Boundary Method for Viscous Flows
This work introduces an immersed boundary method for two-dimensional simulation of incompressible Navier-Stokes equations. The method uses flow field mapping on the immersed boundary and performs a contour integration to calculate immersed boundary forces. This takes into account the relative location of the immersed boundary inside the background grid elements by using inverse distance weights, and also considers the curvature of the immersed boundary edges. The governing equations of the fluid mechanics are solved using a Galerkin-Least squares finite element formulation. The model is
Concentric tubes silicon-based metamaterial structure for mid-IR broadband absorption
In this work, we are proposing a silicon (Si) based concentric tube broadband absorber. The proposed broadband absorber is composed of consecutive concentric tubes of intrinsic Si and doped-Si (D-Si) layers. The structure exhibits a broadband performance within a wide range of mid-IR wavelength spectrum extending from 3 to 7 µm with an absorption peak that varies between 0.88 and 0.97 in the case of S-polarized incident light. We report that light coupling to the proposed concentric tube metamaterial absorber structure over a broad wavelength range is a result of exhibiting multiple resonance
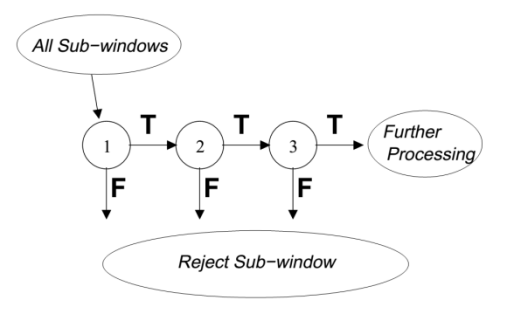
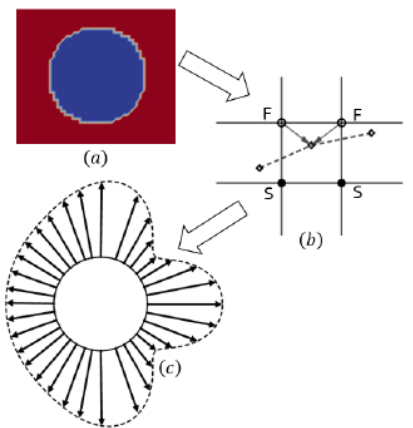
Real-time vehicle detection and tracking using haar-like features and compressive tracking
This paper presents a real-time vision framework that detects and tracks vehicles from stationary camera. It can be used to calculate statistical information such as average traffic speed and flow as well as in surveillance tasks. The framework consists of three main stages. Vehicles are first detected using Haar-like features. In the second phase, an adaptive appearance-based model is built to dynamically keep track of the detected vehicles. This model is also used in the third phase of data association to fuse the detection and tracking results. The use of detection results to update the
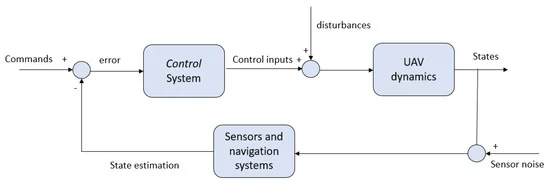
A detailed survey and future directions of unmanned aerial vehicles (Uavs) with potential applications
Recently, unmanned aerial vehicles (UAVs), also known as drones, have gained widespread interest in civilian and military applications, which has led to the development of novel UAVs that can perform various operations. UAVs are aircraft that can fly without the need of a human pilot onboard, meaning they can fly either autonomously or be remotely piloted. They can be equipped with multiple sensors, including cameras, inertial measurement units (IMUs), LiDAR, and GPS, to collect and transmit data in real time. Due to the demand for UAVs in various applications such as precision agriculture

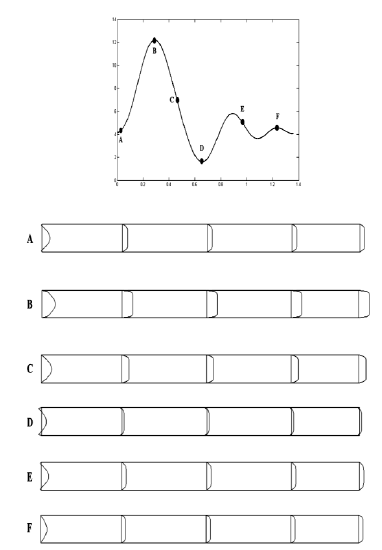
Testing of the Aerodynamic Characteristics of an Inflatable Airfoil Section
Inflatable structures are characterized by being light and easy to manufacture and deploy. Hence, they find many applications in aerospace and aeronautical engineering. In this paper, an inflatable segment with a The National Advisory Committee for Aeronautics (NACA) 0021 airfoil cross-section is designed, fabricated, and tested. The geometrical accuracy of the manufactured inflatable segment is measured using laser scanning. Measurements show that the average normalized error of the chord length and thickness are 2.97% and 0.554%, respectively. The aerodynamic behavior of the inflatable
Finite element analysis of pulsatile blood flow in elastic artery
New hybrid Eulerian/Lagrangian model is presented accounting for the two-way coupling between the pulsating blood flow and the artery deformability. The Streamline-Upwind/Petrove--Galerkin (SUPG) finite element technique is used to treat for the convective nature of the momentum equation. The deformability of the artery walls is accounted for by treating the wall as an elastic beam under transverse unsteady distributed load, namely the fluid pressure. The results of the present contribution compare well against the available published data. © 2019, Isfahan University of Technology.