
Filter by
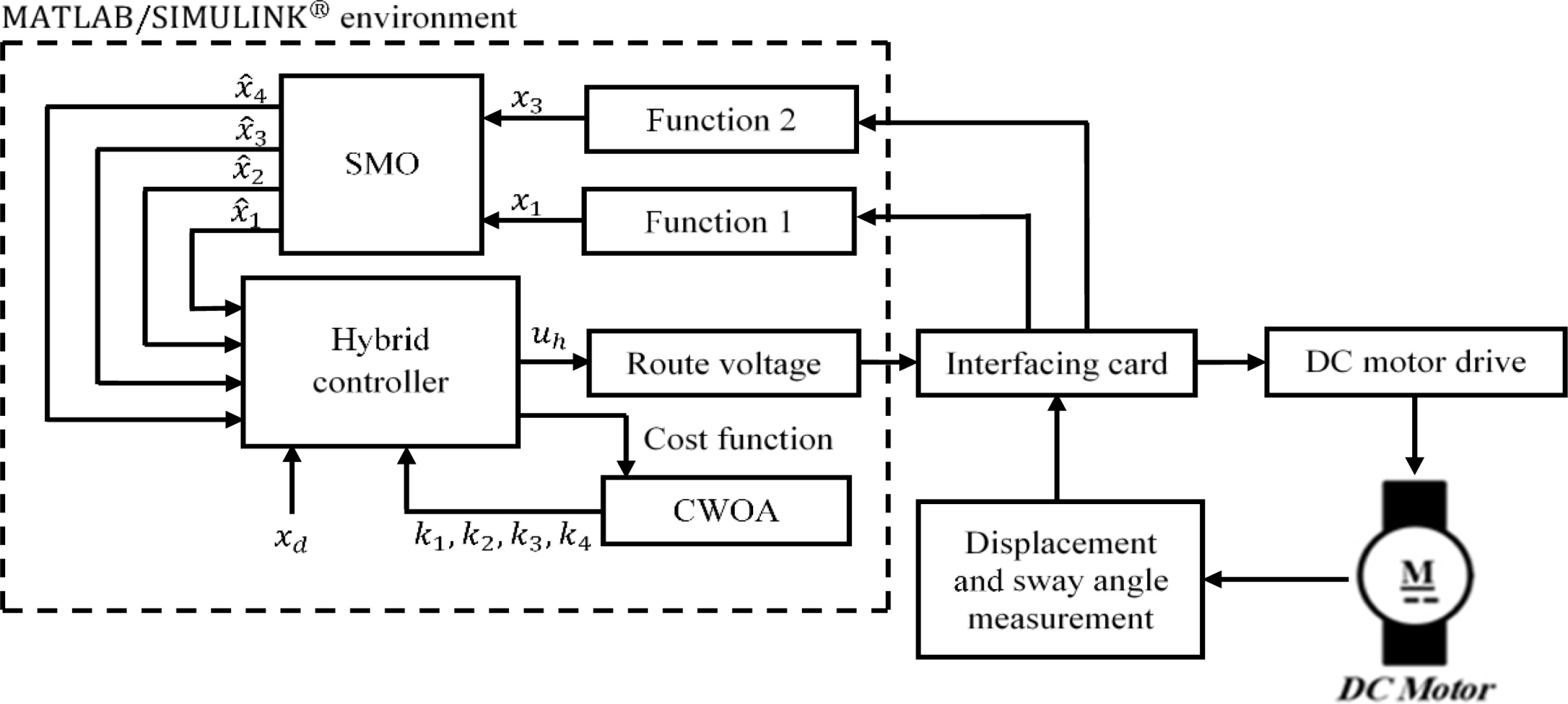
Experimental verification of a hybrid control scheme with chaotic whale optimization algorithm for nonlinear gantry crane: A comparative study
This paper proposes an experimental verification of a hybrid partial feedback linearization (PFL) and deadbeat (DB) control scheme as in Hamdy et al. (2018) with chaotic whale optimization algorithm (CWOA) for a nonlinear gantry crane (GC) system. The PFL linearizes the nonlinear model to end up with a linear closed-loop system. The DB controller is utilized for the desirable accelerated response
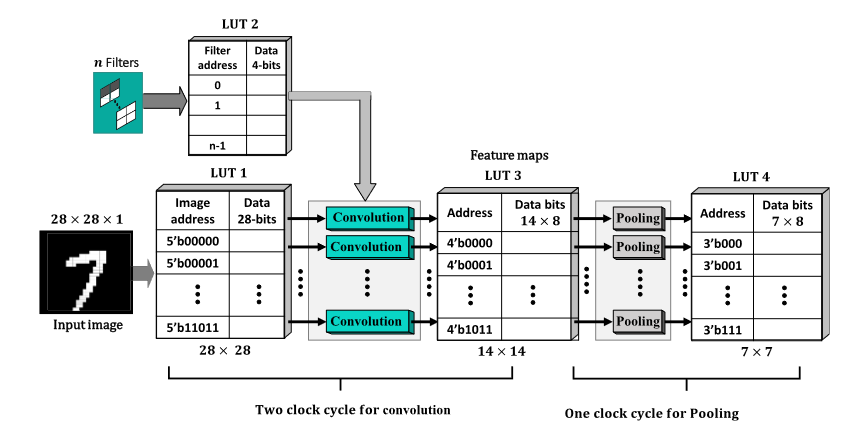
FPGA-Based Memristor Emulator Circuit for Binary Convolutional Neural Networks
Binary convolutional neural networks (BCNN) have been proposed in the literature for resource-constrained IoTs nodes and mobile computing devices. Such computing platforms have strict constraints on the power budget, system performance, processing and memory capabilities. Nonetheless, the platforms are still required to efficiently perform classification and matching tasks needed in various
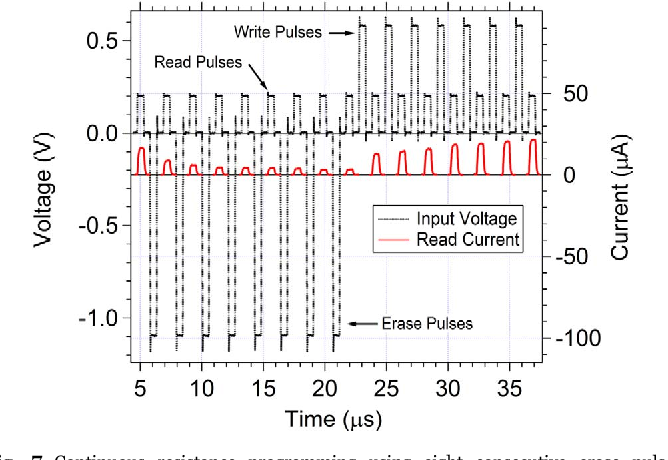
Empirical Temperature Model of Self-Directed Channel Memristor
Memristors are used in many innovative research areas. However, the temperature has a strong effect on mem-ristance, which results in malfunctions. Although commercial a memristor is available, its thermal characteristics are still under-explored. This paper presents a temperature model of a self-directed channel memristor. The experimental results of measuring high-resistive-state memristance
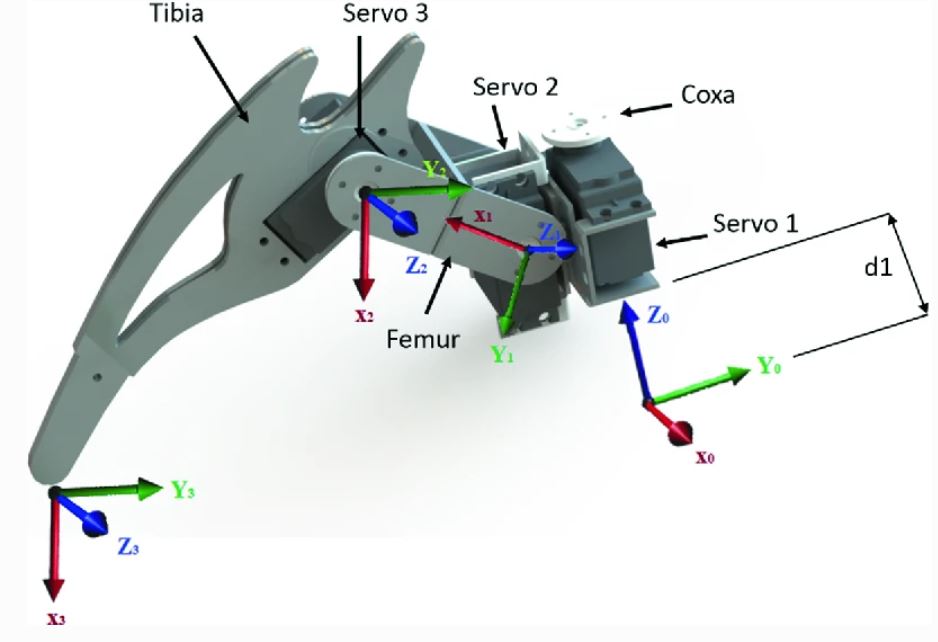
Experimental Modeling of Hexapod Robot Using Artificial Intelligence
Hexapod Robots gave us the opportunity to study walking robots without facing problems such as stability and expensive custom made hardware. It has a great deal of flexibility in moving over different terrains even if some legs become malfunctioned or facing some difficulties in movement. In this study the kinematic analysis of CH3-R 18DOF Hexapod Robot is discussed where each leg contains three
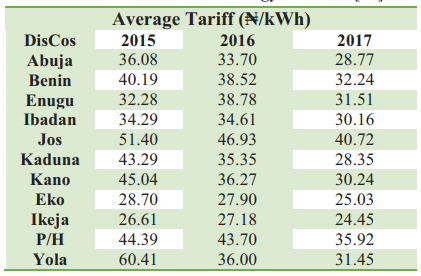
Electricity pricing in an emerging deregulated market: A Case of Nigeria and Egypt.
The globalization and rapid industrialization of any country is a function of availability of electricity in desired quality and quantity. Nigeria and Egypt are the most populated countries in West and North Africa respectively with incredible energy resources both renewable and non-renewable. Yet, the former is highly energy deficient when compared to the later. In recent time, the appropriate
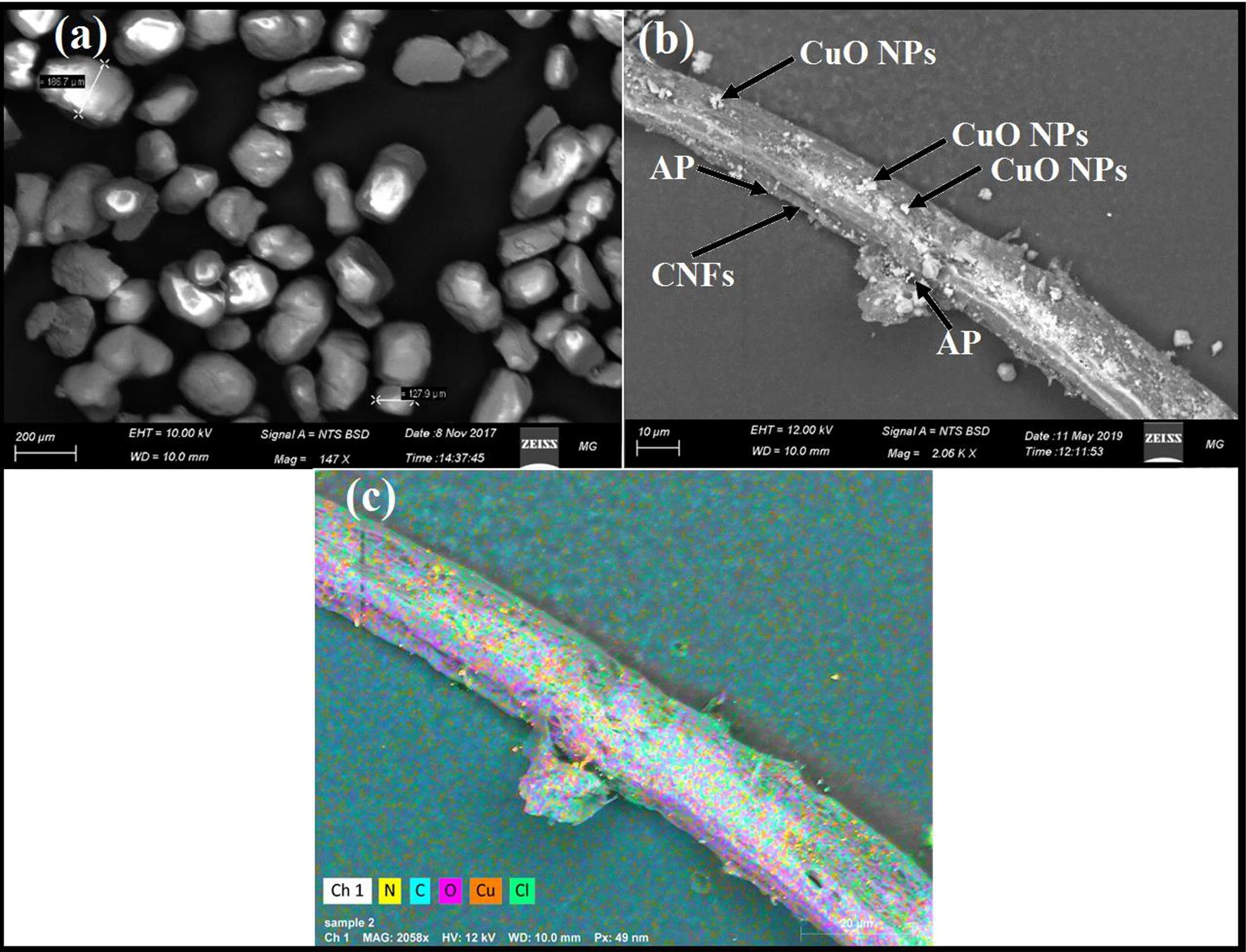
Synthesis of CuO-distributed carbon nanofiber: Alternative hybrid for solid propellants
Carbon nanofibers (CNFs) possess superior catalytic abilities and high surface area. Moreover, energetic particles can be loaded on them by acting as carriers. The current study reports an electroless plating, effective deposition of copper particles (Cu) on the surface of CNFs. The prepared Cu–CNFs hybrid was annealed at 250 °C to form CuO–CNFs. Homogeneous loading of CuO particles on CNFs was
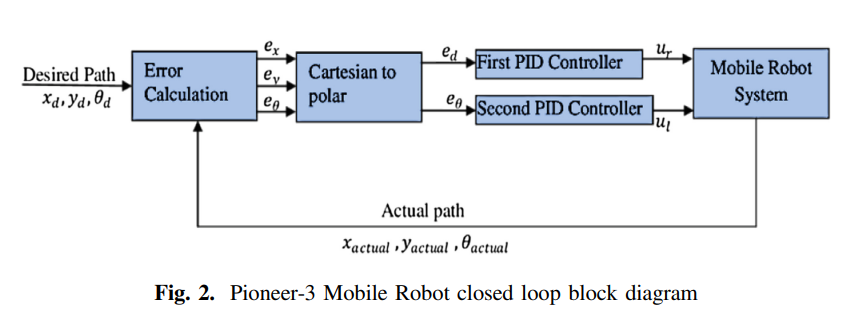
Robust Path Tracking of Mobile Robot Using Fractional Order PID Controller
This paper represents the control of the Pioneer-3 Mobile Robot as a complex non-linear system which provides an object for research nonlinear system kinematics and dynamics analysis. In this paper, the system modeling and simulation is divided into two main parts. The first part is the modeling and simulation using MATLAB and the second part is the whole mechanical design and its characteristics
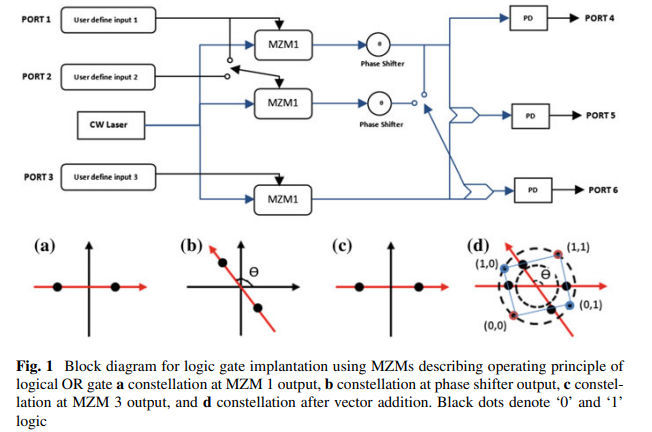
Polarization Encoded Multi-logic Functions with Direct Detection
In this paper, a new scheme for the realization of an optical logic circuit using Mach–Zehnder modulators (MZM) with direct detection has been proposed. Amplitude and phase information of the optical signals have been used for the differentiation of optical signals into four different states that can be represented using two binary inputs, while direct detection has been used for the effective
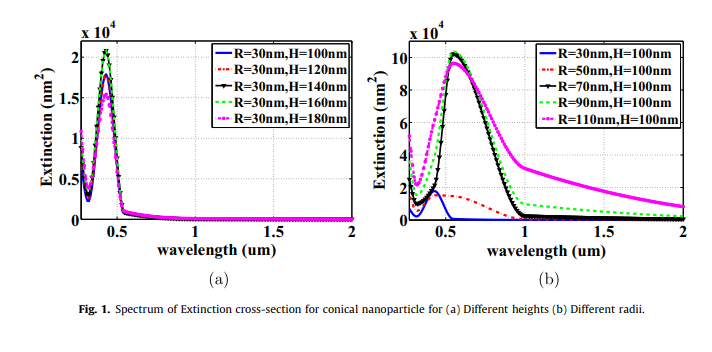
J-V characteristics of plasmonic photovoltaics with embedded conical and cylindrical metallic nanoparticles
Plasmonic photovoltaics (PVs) are promising structures that improve thin-film photovoltaics performance, where optical absorption is improved via embedding metallic nanoparticles in the PV's active layer to trap the incident optical wave into the photovoltaic cell. The presented work investigates the design of PV with both structures of conical and cylindrical metallic nanoparticles through
Experimental Kinematic Modeling of 6-DOF Serial Manipulator Using Hybrid Deep Learning
According to its significance, robotics is always an area of interest for research and further development. While robots have varying types, design and sizes, the six degrees of freedom (DOF) serial manipulator is a famous robotic arm that has a vast areas of applications, not only in industrial application, but also in other fields such as medical and exploration applications. Accordingly