Optimal Fractional-Order PID Controller based on Fractional-Order Actor-Critic Algorithm
Abstract
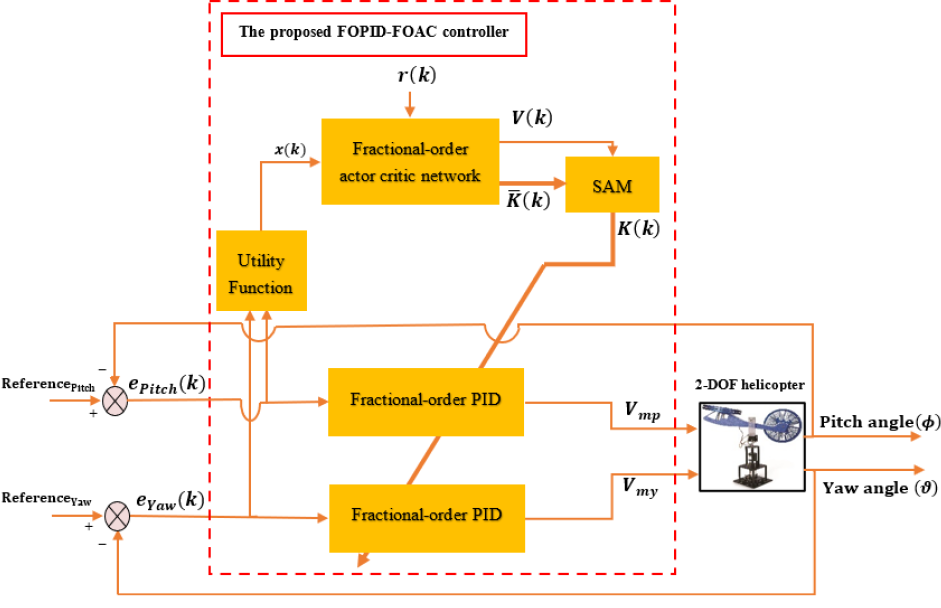
This project proposes an online optimization approach for a fractional-order PID controller using a fractional-order actor-critic algorithm (FOPID-FOAC), aiming to enhance the performance of nonlinear systems. The FOPID-FOAC scheme combines the advantages of fractional-order PID controllers and actor-critic reinforcement learning algorithms. The proposed FOAC algorithm employs fractional-order calculus with adaptive learning rates and introduces a fractional-order rectified linear unit (RLU) for activation function optimization. Stability and convergence analysis are conducted using the Lyapunov theorem, and FO operators for the FOAC algorithm are determined using the gray wolf optimization (GWO) algorithm. Extensive simulations demonstrate the effectiveness of the FOPID-FOAC controller in improving performance metrics such as integral absolute error (IAE), integral squared error (ISE), rising time, maximum overshoot (Max. OS), and settling time compared to other control algorithms. The proposed approach is validated using uncertain nonlinear systems, including a two-degree-of-freedom (2-DOF) helicopter system and an inverted pendulum (IP) system.