

Publications
Filter by

Modeling of Soft Pneumatic Actuators with Different Orientation Angles Using Echo State Networks for Irregular Time Series Data
Modeling of soft robotics systems proves to be an extremely difficult task, due to the large deformation of the soft materials used to make such robots. Reliable and accurate models are necessary for the control task of these soft robots. In this paper, a data-driven approach using machine learning is presented to model the kinematics of Soft Pneumatic Actuators (SPAs). An Echo State Network (ESN)
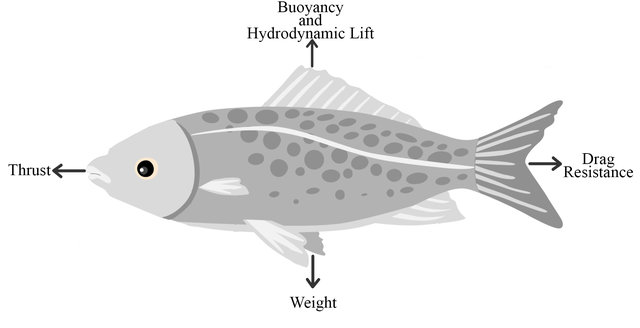
Underwater Soft Robotics: A Review of Bioinspiration in Design, Actuation, Modeling, and Control
Nature and biological creatures are some of the main sources of inspiration for humans. Engineers have aspired to emulate these natural systems. As rigid systems become increasingly limited in their capabilities to perform complex tasks and adapt to their environment like living creatures, the need for soft systems has become more prominent due to the similar complex, compliant, and flexible
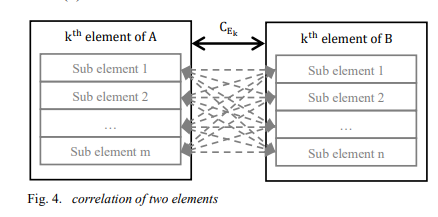
Systematic university decision making based on footprint identifiers
A new systematic decision-making framework for universities is presented. The framework avoids the disadvantages of the balanced score cards technique. A solid mathematical technique is provided for mapping processes and quality items. Application to the Egyptian system is fully explained. The footprint concept developed within an international initiative is introduced. The mathematical
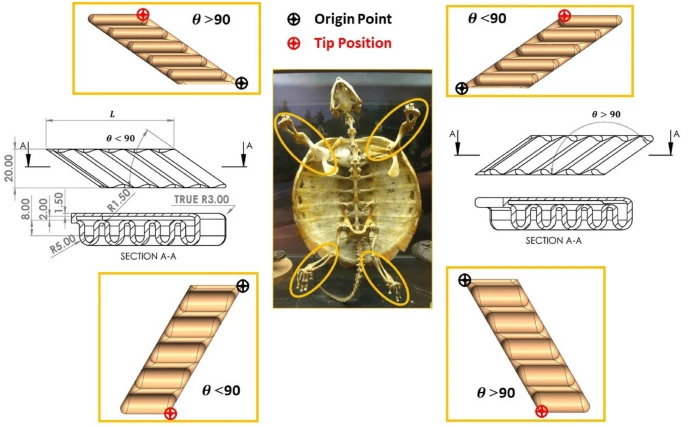
Modelling and implementation of soft bio-mimetic turtle using echo state network and soft pneumatic actuators
Advances of soft robotics enabled better mimicking of biological creatures and closer realization of animals’ motion in the robotics field. The biological creature’s movement has morphology and flexibility that is problematic deportation to a bio-inspired robot. This paper aims to study the ability to mimic turtle motion using a soft pneumatic actuator (SPA) as a turtle flipper limb. SPA’s

Design, simulation, and kinematics of 9-DOF Serial-Parallel Hybrid Manipulator Robot
Serial manipulator robot is one of the most advanced robots in the last decade. The demand for this type of robot leads the researchers to develop and improve the robot to increase its workspace, speed and to minimize the control complexity. This paper presents a novel robot configuration that combines a 6 DOF serial manipulator with a 3 DOF spherical parallel wrist. The serial manipulator is KUKA
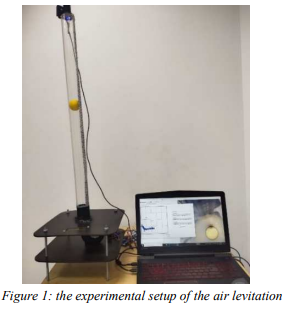
Modeling of Nonlinear Enhanced Air Levitation System using NARX Neural Networks
the proposed paper aims to design and model an air levitation system, which is a highly nonlinear system because of its fast dynamics and low damping. The system is trained using a Nonlinear Autoregressive model with exogenous input (NARX model). An enhanced height measurement system, modified setup, and several training techniques have been used to overcome the restrictions that the non-linearity
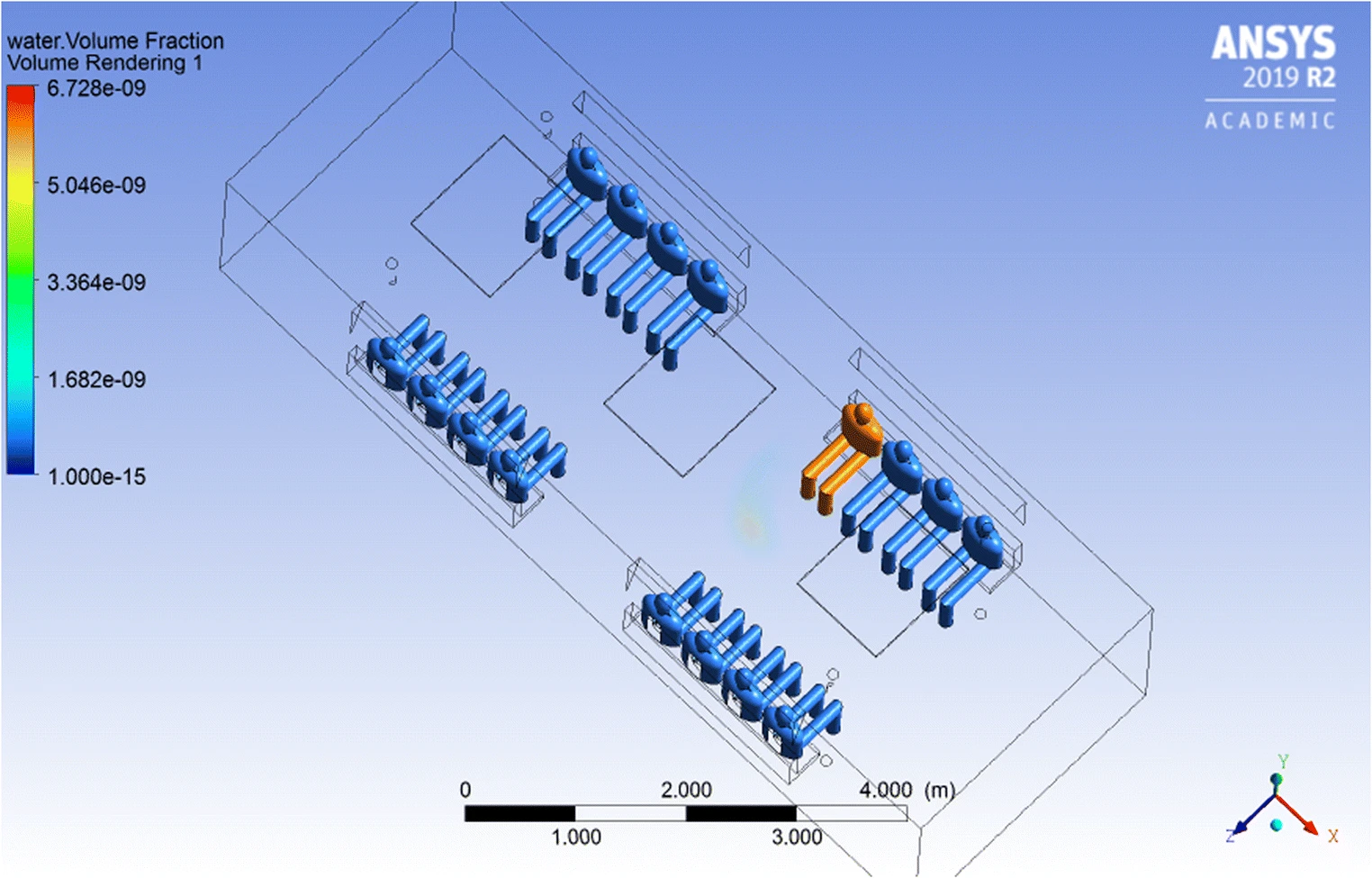
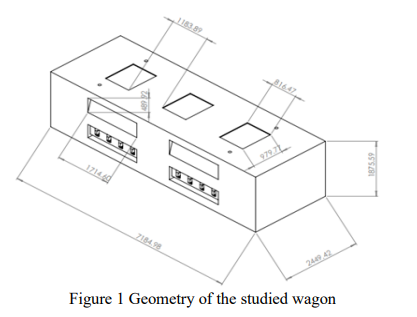
Air change rate effects on the airborne diseases spreading in Underground Metro wagons
The effect of the rate of change of fresh air inside passengers’ wagons for Underground Metro on the spreading of airborne diseases like COVID-19 is investigated numerically. The study investigates two extreme scenarios for the location of the source of infection within the wagon with four different air change rates for each. The first scenario considers the source of infection at the closest

Lid-Driven Cavity Flow with Elliptic Obstacle at Different Orientations
The aim of the present work is to predict the flow field around an elliptic obstacle at different orientations inside a square Lid-Driven Cavity (LDC). The Lattice Boltzmann Method (LBM) is used to simulate the flow at a Reynolds number, Re, of 100, using the two-dimensional nine-velocity, (D2Q9) lattice configuration and the BGK collision operator. The in-house code is validated using data from
Regression Modeling for the Ventilation Effect on COVID-19 Spreading in Metro Wagons
The effect of different ventilation parameters on the infection potential of COVID-19 in a metro wagon is numerically studied. Two key indicators are used to quantify this potential. Based on the numerical results a regression analysis is performed to come up with the most suitable regression model for these key parameters. The proposed regression models are helpful in quantifying the infection

An improved generic Johnson-Cook model for the flow prediction of different categories of alloys at elevated temperatures and dynamic loading conditions
This paper presents a generic model for material flow prediction based on the well-known Johnson-Cook model. The model is developed to precisely predict the flow behavior of various categories of alloys. The coupled effects between strain, strain rate, and temperature were taken into consideration. The proposed model is developed and assessed using the hot deformation data of four different