Theoretical and experimental investigation study of data driven work envelope modelling for 3D printed soft pneumatic actuators
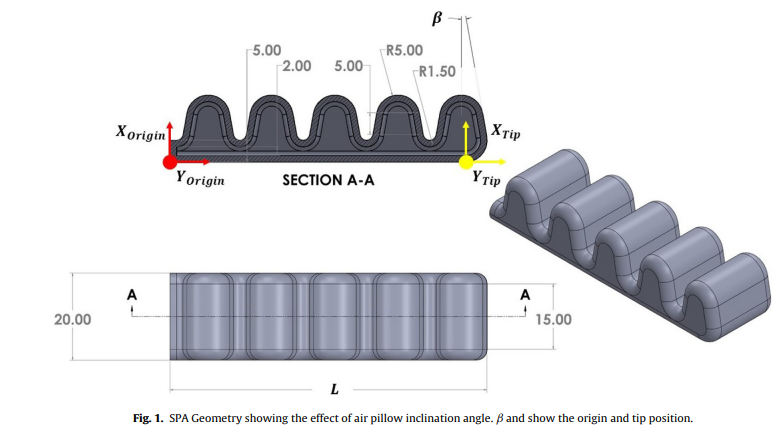
In the last decade, soft robotics is considered one of the most widely researched fields in robotics, as it has many advantages and more versatile use than rigid robotics. Soft robots are flexible, which enable them to metaphorically complex designs, enabling them to imitate the movement of living things. In this article, the use of regression models with finite element analysis (FEA) data is compared with neural network (NN) models trained on visual feedback data. The effect of the soft pneumatic actuator (SPA) air pillow inclination angle (β) under positive and vacuum pressure on the actuator work envelope is modelled from the perspective of design and control. The mathematical model is developed by two successive one-dimensional regression models, in which the influence of 21 different designs of positive pressure and vacuum pressure on the working range is studied. A very good matching experimental results acquired using image processing feedback for three selected SPAs at β = 0°, 10°, and 20° have been validated with FEA results. Also, the NN model is developed based on the experimental data of the three SPAs to predict the effect of any β angle on the work envelope under positive and vacuum pressure. Finally, the two models (mathematical and NN models) ability to predict the behaviour of SPA is tested and validated by running random β that is not involved in the main study that β = 13.5°, and 20.5°. The results show great similarity and apply to a wide range of β. © 2021 Elsevier B.V.