

Fractional Order Two Degree of Freedom PID Controller for a Robotic Manipulator with a Fuzzy Type-2 Compensator
In this paper a novel strategy for the position control and trajectory tracking of robotic manipulators is proposed. This strategy consists of an independent two degree of freedom PID controller for a two links robotic arm. Due to the capability of two degree of freedom PID controllers to deal with disturbances, each link is controlled independently considering that the disturbance does not affect the system performance due to the robustness of the closed loop system. Then, a fuzzy type-2 centralized compensator is implemented to drive the orientation variables with the desired trajectory in
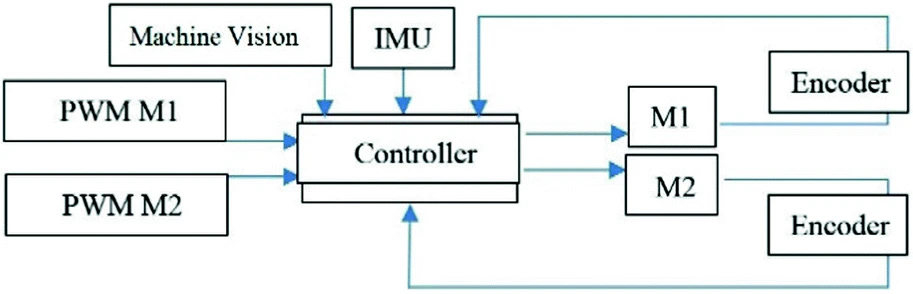
Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool for complex nonlinear system, the second is using MATLAB software system Identification Tool. The study Uses PID, Fuzzy logic controller and fuzzy self-tuning of PID controller to control the path
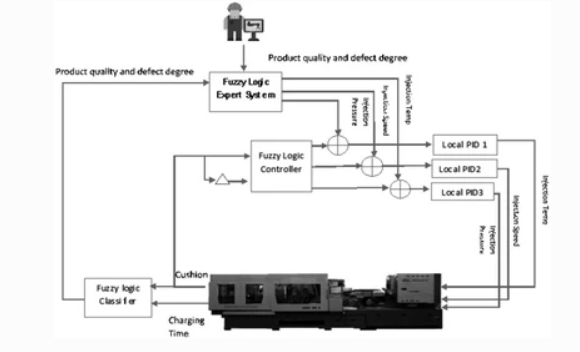
Improved Production Key Performance Indicators (KPI’s) Using Intelligent-Manufacturing Execution Systems (I-MES)
The aim of this research is to reduce the gap between manufacture expertise and management expertise by using modern technology like Manufacturing Execution System (MES) via Artificial Intelligence (AI) and Machin Learning (ML). A design of MES has been proposed and implemented on El-Araby Plastic Injection Molding (PIM) factory. This work is based on the International Society of Automation Standard (ISA-S95). A fully automated data management system has been designed and implemented to control data follow between shop floor e.g. (machines and operators) and management floor e.g. (production
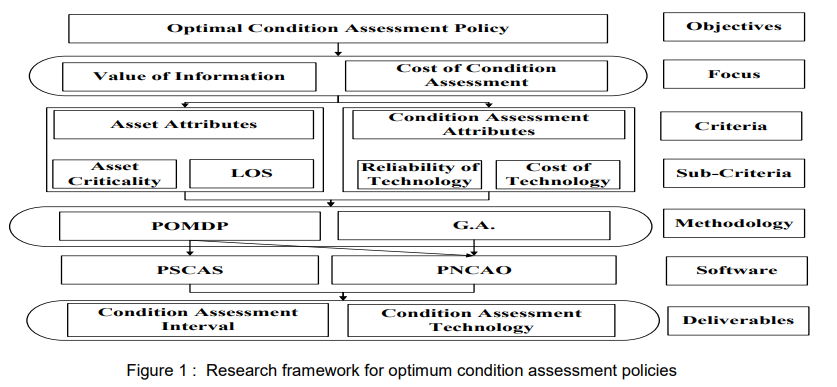
Optimizing budget allocation for condition assessment of water and sewer infrastructures
Much research has focused on the development of optimal strategies for rehabilitation and replacement of water and sewer infrastructures. Condition assessment is an integral component in any asset management program for assessing the asset physical condition. Determining the condition of buried infrastructure tends to be cumbersome, costly and error-prone. As such, decision makers must balance the value of obtained information through condition assessments with the cost of obtaining this information. Such decisions must balance between conflicting needs and need to consider the sought level of

Swarm intelligence application to UAV aided IoT data acquisition deployment optimization
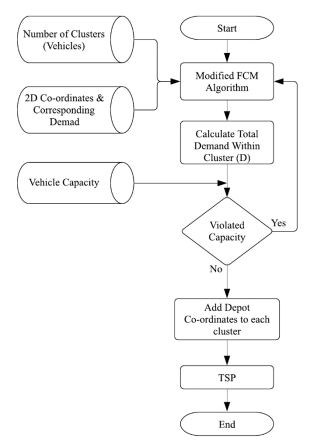
Supervised fuzzy C-means techniques to solve the capacitated vehicle routing problem
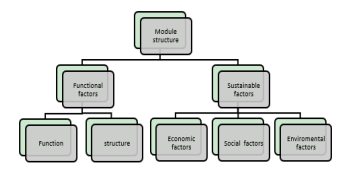
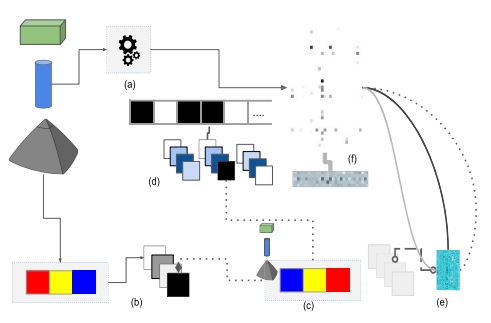
Sustainable Product Design through Non-dominated Sorting Cuckoo Search
Sustainability is an important consideration in product design. The sustainable design should fully consider the environmental, social, and economic factors of the product. However, the three factors are often conflicting with each other. This paper aims to strike a balance between these factors and achieve sustainable product design through multi-objective optimization. The three influencing factors of sustainability, namely, the environmental factor, social factor and economic factor, were respectively defined as environmental impact, labor time and labor cost. Then, the product to be
Neural Knapsack: A Neural Network Based Solver for the Knapsack Problem
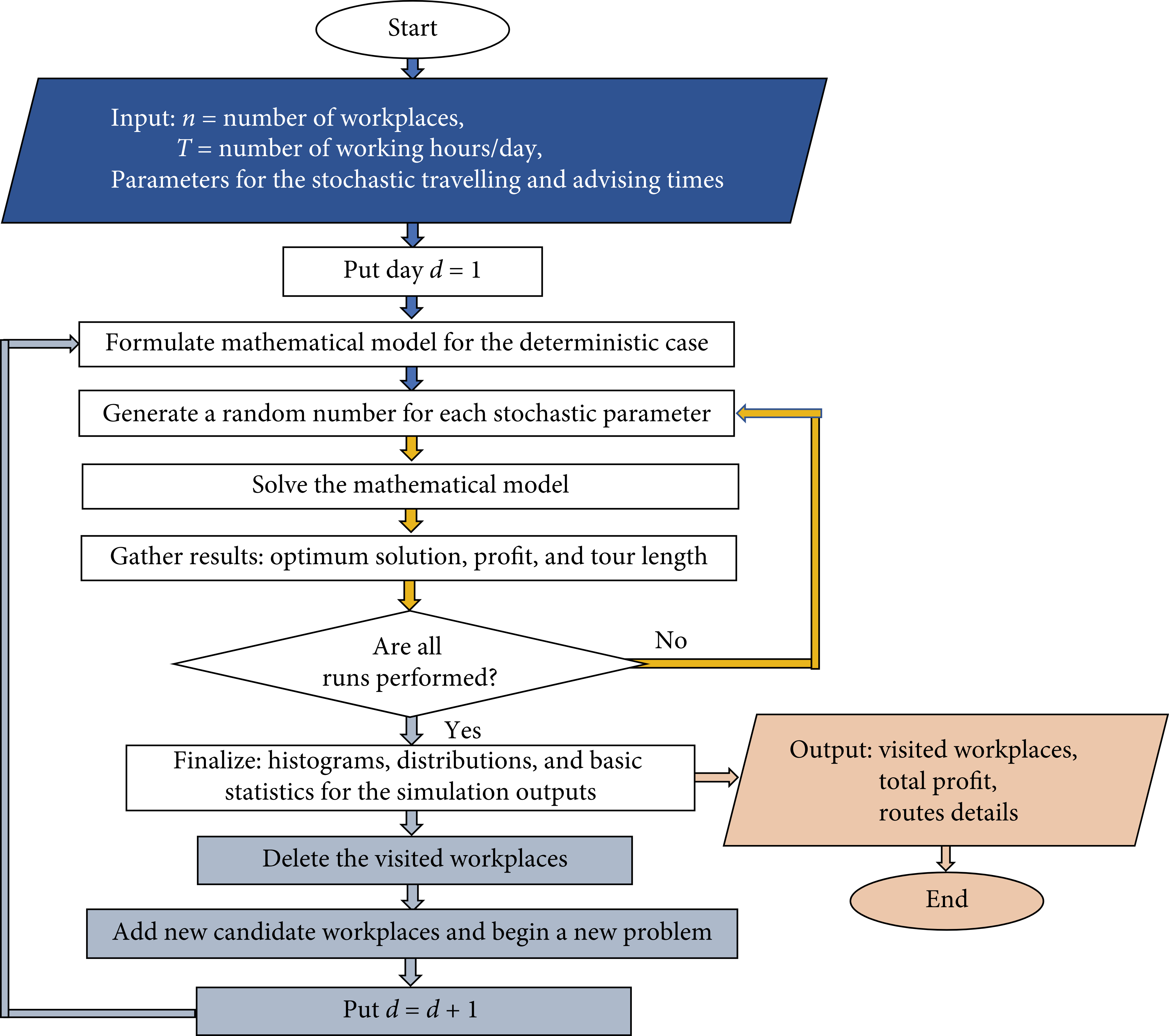
Stochastic travelling advisor problem simulation with a case study: A novel binary gaining-sharing knowledge-based optimization algorithm
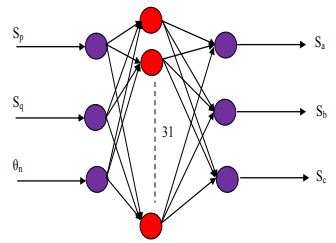
Neural Network Based Switching State Selection for Direct Power Control of Three Phase PWM-Rectifier
This article proposes an intelligent approach to the Direct Power Control technique of the PWM rectifier, this control technique improves the performance of PWM converter, called Direct Power Control Based on Artificial Neural Network (ANN), applied for the selection of the optimal control vector. DPC-ANN ensures smooth control of active and reactive power in all Sectors and reduces current ripple. Finally, the developed DPC was tested by simulation, the simulation results proved the excellent performance of the proposed DPC scheme. © 2018 IEEE.