
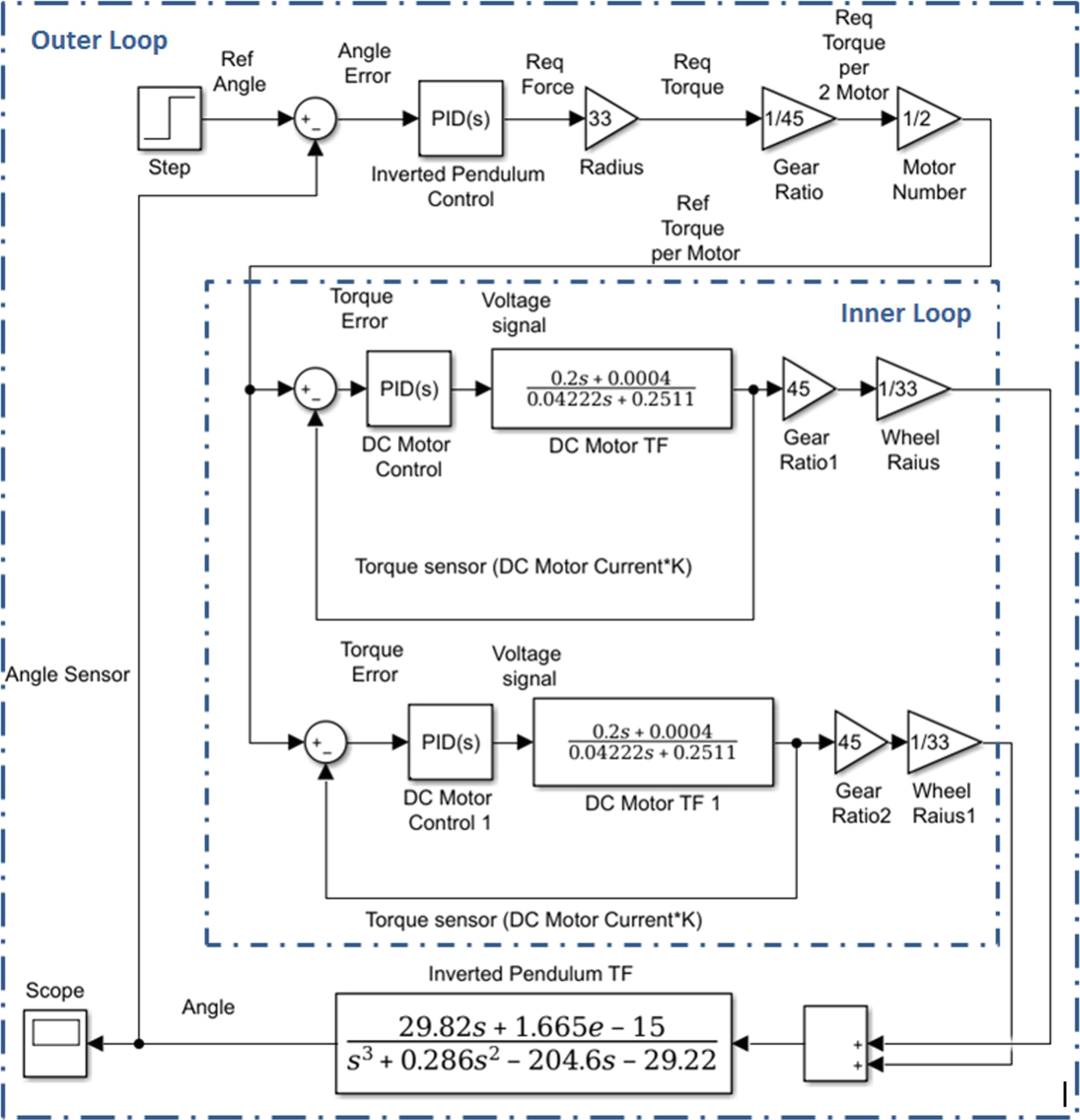
Self-balancing Robot Modeling and Control Using Two Degree of Freedom PID Controller
This paper represents the control of a two-wheel self-balancing robot based on the theory of controlling the inverted pendulum. This paper dividing the system modeling into two main parts. The first part is the dc motor and the second part are the whole mechanical design and its characteristics as a function in the motor speed and the torque depending on the system, creating two control closed loops inner and outer. The study uses conventional proportional–integral–derivative (PID) and two degree of freedom PID controllers to obtain a robust controller for the system. The inner loop controls
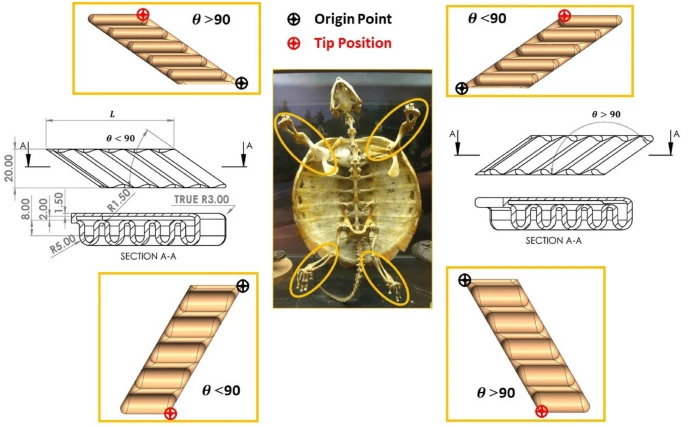
Modelling and implementation of soft bio-mimetic turtle using echo state network and soft pneumatic actuators
Advances of soft robotics enabled better mimicking of biological creatures and closer realization of animals’ motion in the robotics field. The biological creature’s movement has morphology and flexibility that is problematic deportation to a bio-inspired robot. This paper aims to study the ability to mimic turtle motion using a soft pneumatic actuator (SPA) as a turtle flipper limb. SPA’s behavior is simulated using finite element analysis to design turtle flipper at 22 different geometrical configurations, and the simulations are conducted on a large pressure range (0.11–0.4 Mpa). The
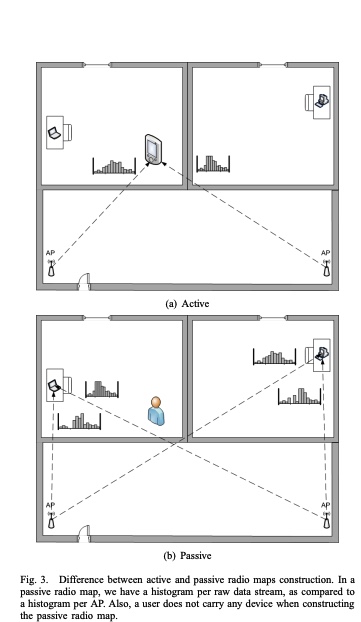
A deterministic large-scale device-free passive localization system for wireless environments
The widespread usage of wireless local area networks and mobile devices has fostered the interest in localization systems for wireless environments. The majority of research in the context of wirelessbased localization systems has focused on device-based active localization, in which a device is attached to tracked entities. Recently, device-free passive localization (DfP) has been proposed where the tracked entity is neither required to carry devices nor participate actively in the localization process. DfP systems are based on the fact that RF signals are affected by the presence of people
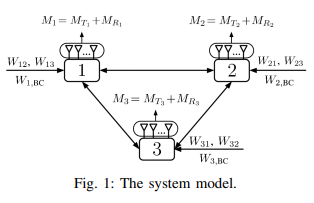
Asymmetric degrees of freedom of the full-duplex MIMO 3-way channel
In this paper, we characterize the asymmetric total degrees of freedom (DoF) of a multiple-input multiple-output (MIMO) 3-way channel. Each node has a separate-antenna full-duplex MIMO transceiver with a different number of antennas, where each antenna can be configured for either signal transmission or reception. Each node has two unicast messages to be delivered to the two other nodes. We first derive upper bounds on the total DoF of the system. Cut-set bounds in conjunction with genie-aided bounds are derived to characterize the achievable total DoF. Afterwards, we analytically derive the
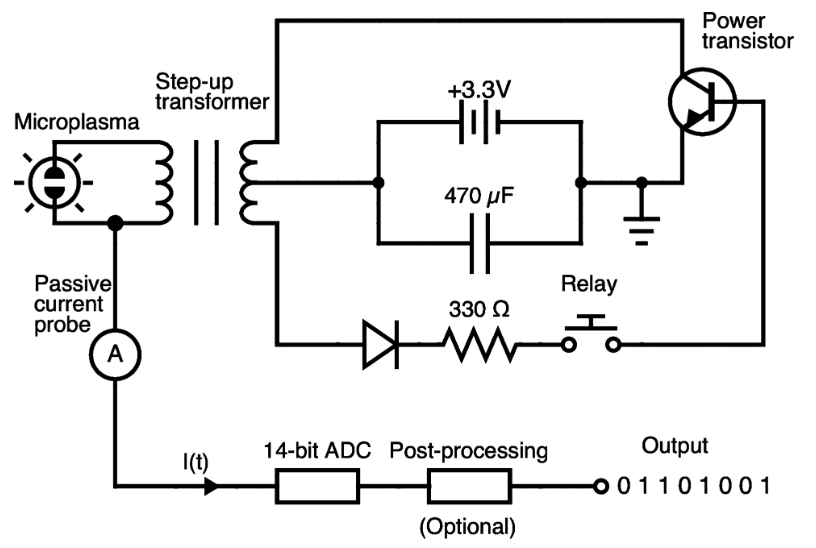
Atmospheric pressure air microplasma current time series for true random bit generation
Generating true random bits of high quality at high data rates is usually viewed as a challenging task. To do so, physical sources of entropy with wide bandwidth are required which are able to provide truly random bits and not pseudorandom bits, as it is the case with deterministic algorithms and chaotic systems. In this work we demonstrate a reliable high-speed true random bit generator (TRBG) device based on the unpredictable electrical current time series of atmospheric pressure air microplasma (APAMP). After binarization of the sampled current time series, no further post-processing was
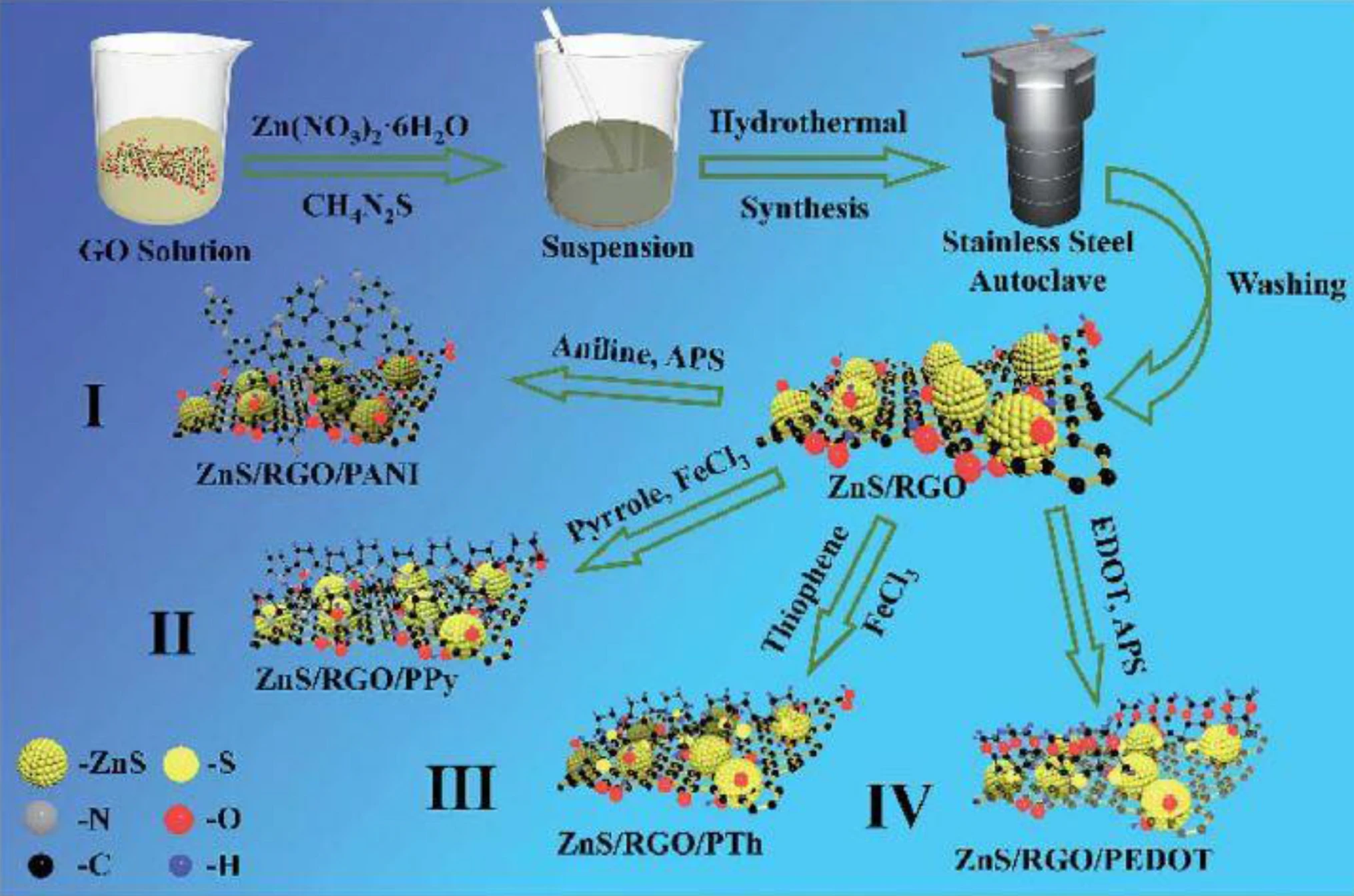
Advanced materials and technologies for supercapacitors used in energy conversion and storage: a review
Supercapacitors are increasingly used for energy conversion and storage systems in sustainable nanotechnologies. Graphite is a conventional electrode utilized in Li-ion-based batteries, yet its specific capacitance of 372 mA h g−1 is not adequate for supercapacitor applications. Interest in supercapacitors is due to their high-energy capacity, storage for a shorter period and longer lifetime. This review compares the following materials used to fabricate supercapacitors: spinel ferrites, e.g., MFe2O4, MMoO4 and MCo2O4 where M denotes a transition metal ion; perovskite oxides; transition metals
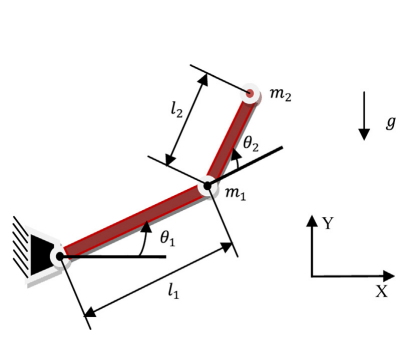
Design of fractional order fuzzy sliding mode controller for nonlinear complex systems
Controlling a nonlinear, time-varying, uncertain, coupled multiinput-multioutput (MIMO) complex system is always a challenging task for control engineers. A linear PID controller is not able to control effectively these complex systems and a robust adaptive controller is needed for perfect control. In this chapter, a fractional order fuzzy sliding mode proportional derivative (FOFSMCPD) controller is presented to control a two-link planar rigid robotic manipulator system. Literature reveals that sliding mode controllers (SMC) have the serious issue of fast oscillations, called chattering, in

Bridge information modeling in sustainable bridge management
Bridge Management Systems (BMS) play a crucial role in maintenance and rehabilitation decisions related to bridges. This paper presents using Bridge Information Modeling (BrIM) framework that adopts BMS features including; databases, inspection module, and condition assessment module. The proposed BrIM framework creates a database of bridges' components and generates inspection spreadsheets. It also visualizes bridge components considering the information stored in the database and inspection spreadsheets, using Structured Query Language (SQL) statements. The paper presents the integration of
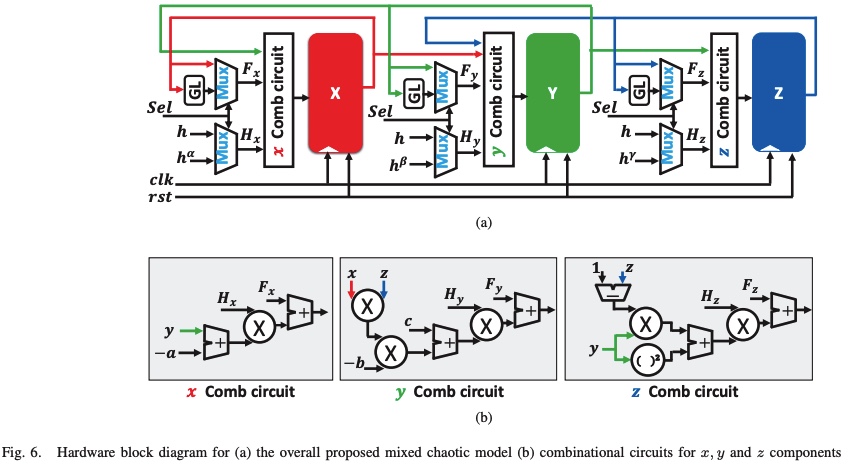
A Digital Hardware Implementation for A new Mixed-Order Nonlinear 3-D Chaotic System
This paper introduces a generic modeling for a 3-D nonlinear chaotic based on fractional-order mathematical rules. Also, a novel modeling for the system using a mixture between integer and fractional-order calculus is proposed. Dynamics of the new realization are illustrated using phase portrait diagrams with complex behavior. Also, a great change in the parameter ranges is investigated using bifurcation diagrams. MATLAB and Xilinx ISE 14.5 are used in system simulations. Furthermore, the digital hardware implementation is done using Xilinx FPGA Virtex-5 kit. The synthesis report shows that

FCM-based approach for locating visible videowatermarks
The increased usage demand for digital multimedia has induced significant challenges regarding copyright protection, which is the copy control and proof of ownership. Digital watermarking serves as a solution to these kinds of problems. Among different types of digital watermarking, visible watermarking protects the copyrights effectively, since the approach not only prevents pirates but also visually proves the copyright of the broadcasted video. A visible watermark could be in any location on the frame (corner, center, diagonal, etc.). In addition, it could either completely or partially