
Filter by
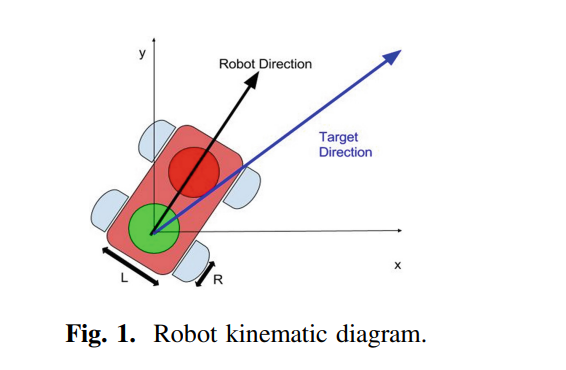
Design and Implementation of Fuzzy PID Controller into Multi Agent Smart Library System Prototype
This paper compares the performance of four different controllers implemented on two multi agent robots to stabilize its motion from one station to another during delivery tasks. The controllers are; multi-position controller, PID controller, fuzzy logic controller and fuzzy-PID controller. The aim of this paper is to control the mobile robot robustly to arrive its target destination. The robots
Fuzzy Logic Controller with Color Vision System Tracking for Mobile Manipulator Robot
The purpose of this article is to present a theoretical and practical implementation of a fuzzy algorithm methodology to control a mobile manipulator path planning using a real-time vision system tracking. To meet high performance response and robust stability of the platform navigation, a fuzzy logic controller is designed with realistic constrains. OpenCV library is used to implement Background
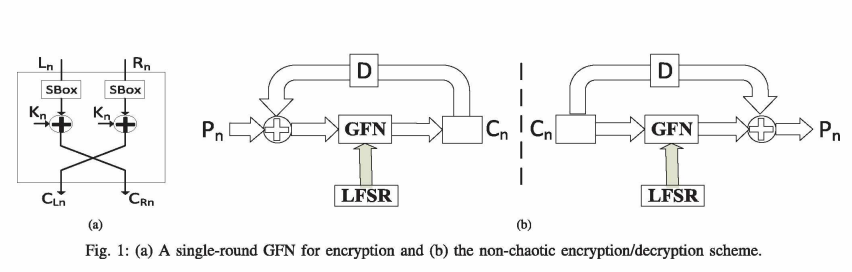
Security and Efficiency of Feistel Networks Versus Discrete Chaos for Lightweight Speech Encryption
This paper compares examples of non-chaotic and chaotic ciphers from the viewpoint of their suitability for speech encryption, especially in real-time and lightweight cipher systems. The non-chaotic encryption scheme depends on a modified Generalized Feistel Network (GFN), Linear Feedback Shift Register (LFSR) and Substitution Boxes (S-Boxes). The chaotic encryption scheme utilizes a generalized
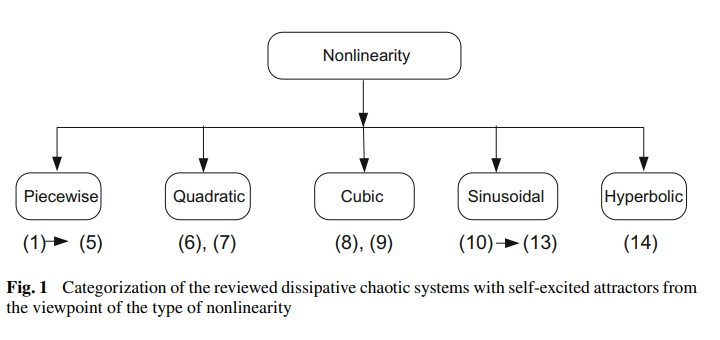
Self-excited attractors in jerk systems: Overview and numerical investigation of chaos production
Chaos theory has attracted the interest of the scientific community because of its broad range of applications, such as in secure communications, cryptography or modeling multi-disciplinary phenomena. Continuous flows, which are expressed in terms of ordinary differential equations, can have numerous types of post transient solutions. Reporting when these systems of differential equations exhibit
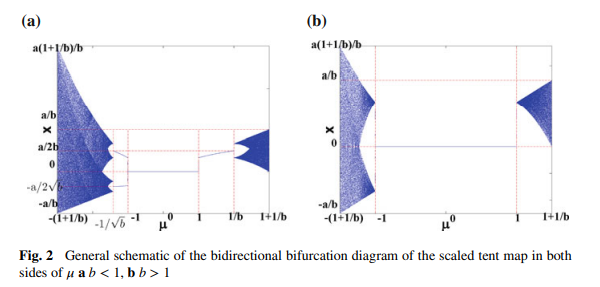
Chaos and bifurcation in controllable jerk-based self-excited attractors
In the recent decades, utilization of chaotic systems has flourished in various engineering applications. Hence, there is an increasing demand on generalized, modified and novel chaotic systems. This chapter combines the general equation of jerk-based chaotic systems with simple scaled discrete chaotic maps. Two continuous chaotic systems based on jerk-equation and discrete maps with scaling
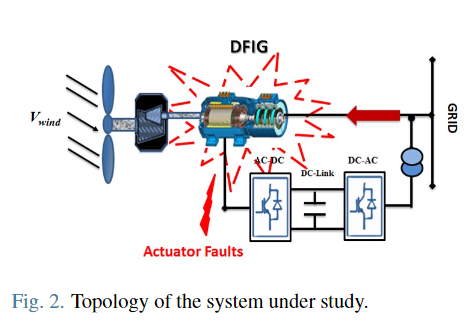
A Novel Actuator Fault-tolerant Control Strategy of DFIG-based Wind Turbines Using Takagi-Sugeno Multiple Models
In this paper, a new combined fuzzy observer-based fault-tolerant tracking control scheme is proposed for a doubly fed induction generator (DFIG) based wind turbine (WT) subject to actuator faults. The main contribution consists of the proposal of a novel fault-tolerant fuzzy tracking controller combined with a nominal control law. The control objective is to ensure good state references tracking
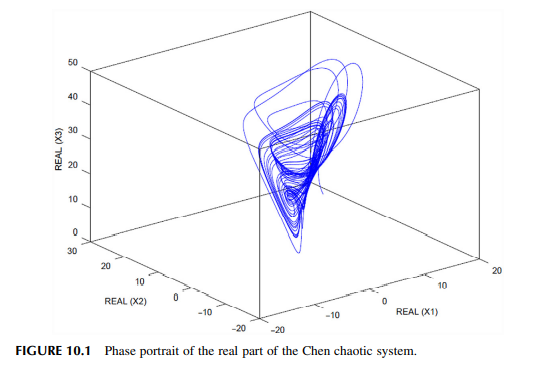
Sliding mode stabilization and synchronization of fractional order complex chaotic and hyperchaotic systems
This chapter is intended to design and analyze several sliding mode techniques for the stabilization and synchronization of fractional order complex chaotic and hyperchaotic systems. Considering that chaos is a hot topic nowadays due to the vast number of real physical systems such as mechanical, electrical, and chemical systems in which this phenomenon is found; this book chapter will provide
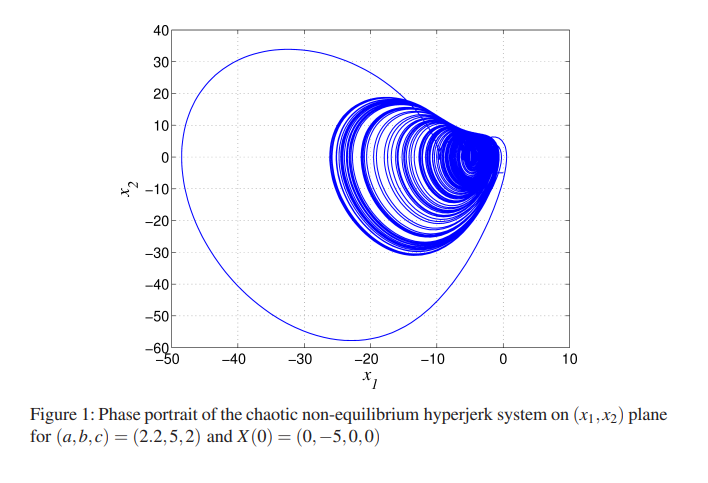
A 4-D chaotic hyperjerk system with a hidden attractor, adaptive backstepping control and circuit design
A novel 4-D chaotic hyperjerk system with four quadratic nonlinearities is presented in this work. It is interesting that the hyperjerk system has no equilibrium. A chaotic attractor is said to be a hidden attractor when its basin of attraction has no intersection with small neighborhoods of equilibrium points of the system. Thus, our new non-equilibrium hyperjerk system possesses a hidden
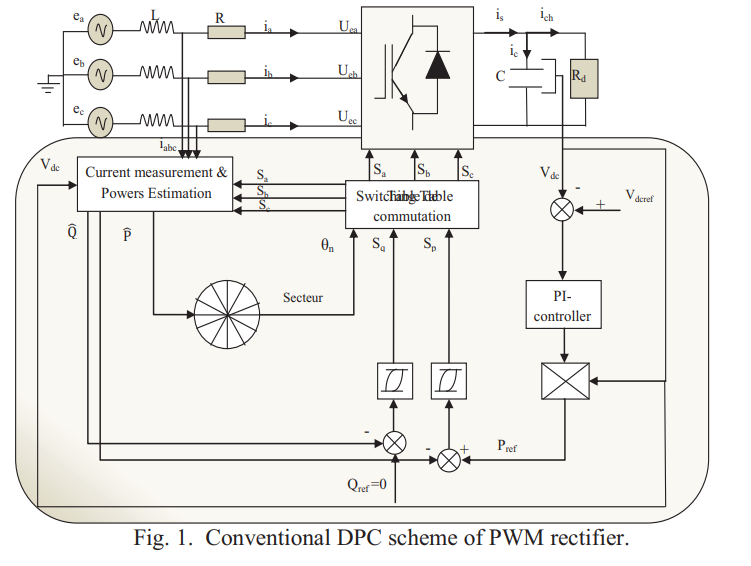
Direct Power Control of a three-phase PWM-Rectifier based on Petri nets for the selection of Switching States
This article proposes a new simple scheme for direct power control of a PWM rectifier without a switch table and voltage sensor. The selection of the switching state of the converter is based on the transition of a Petri net, using the instantaneous active and reactive power tracking errors and the angular position of the network line voltage estimated as variables of Controller input based on
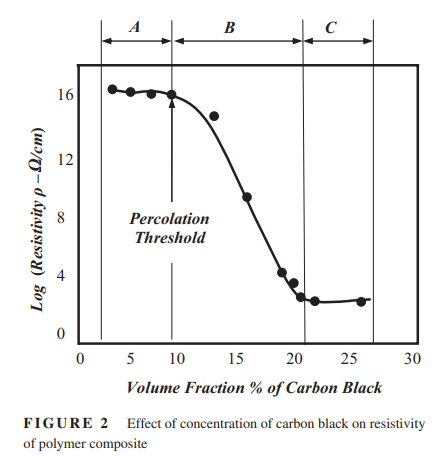
Dynamic behavior and damping characteristics of carbon black polymer composites at high strain rates
The dynamic stress–strain behavior and the damping characteristics of carbon black (CB)/polymer composites at high strain rates are measured using the split Hopkinson pressure bar. These characteristics are determined for polyurethane impregnated with 20% CB nanoparticles and compared with those of pristine polyurethane at strain rates ranging between 2,400 and 7,000 s−1. The obtained results