
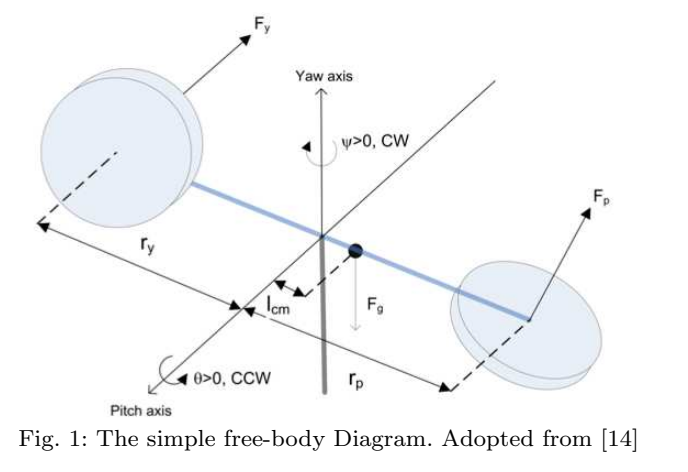
PID Controller for 2-DOFs Twin Rotor MIMO System Tuned with Particle Swarm Optimization
This paper presents the modelling and control of a 2-DOFs Twin rotor multi input multi output (MIMO) system which is a laboratory setup resembling the dynamics of a helicopter. In this paper, the system modelling process is done using the common conventional mathematical model based on Euler-Lagrange method. The transfer functions of the model are used in the different tuning methods to reach the optimal PID gain values. The study uses conventional Proportional-Integral (PI) and Proportional-Integral-Derivative (PID) controllers to obtain a robust controller for the system. Particle Swarm
Modeling of Nonlinear Enhanced Air Levitation System using NARX Neural Networks
the proposed paper aims to design and model an air levitation system, which is a highly nonlinear system because of its fast dynamics and low damping. The system is trained using a Nonlinear Autoregressive model with exogenous input (NARX model). An enhanced height measurement system, modified setup, and several training techniques have been used to overcome the restrictions that the non-linearity of the system imposes in the literature. The system mathematical model has been illustrated, followed by an identified model using NARX model trained on several input-output data from the physical

Design, simulation, and kinematics of 9-DOF Serial-Parallel Hybrid Manipulator Robot
Serial manipulator robot is one of the most advanced robots in the last decade. The demand for this type of robot leads the researchers to develop and improve the robot to increase its workspace, speed and to minimize the control complexity. This paper presents a novel robot configuration that combines a 6 DOF serial manipulator with a 3 DOF spherical parallel wrist. The serial manipulator is KUKA kr6 R900 type, which is a real industrial robot. At the same time, the parallel spherical wrist is 3-RRS type (Revolute- Revolute-Spherical Joint), which can support one translation movement in the Z
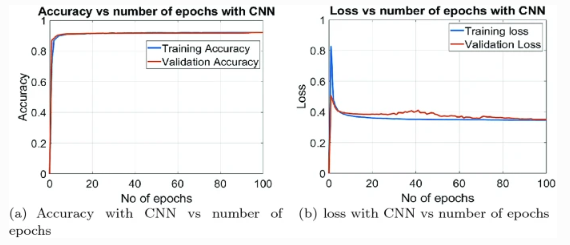
Solving Inverse Kinematics of a 7-DOF Manipulator Using Convolutional Neural Network
This paper presents a way to solve inverse kinematics of a 7-DOF manipulator using artificial neural networks. The manipulator consists of a 6-DOF articulated arm installed on a linear guide system to increase the workspace of the robot. The purpose of this paper is to provide an alternative to the traditional and complicated way to solve inverse kinematics by using artificial neural networks. The training data is generated from MATLAB after obtaining the DH parameters and workspace of the manipulator. Then, it was fed to the convolutional neural architecture to obtain a model for the
Fuzzy Logic Controller with Color Vision System Tracking for Mobile Manipulator Robot
The purpose of this article is to present a theoretical and practical implementation of a fuzzy algorithm methodology to control a mobile manipulator path planning using a real-time vision system tracking. To meet high performance response and robust stability of the platform navigation, a fuzzy logic controller is designed with realistic constrains. OpenCV library is used to implement Background Modeling technique to track in real time a color object and to extract its (X, Z) coordinates, then an ultrasonic sensor is coupled with the camera to calculate the depth “Y” of the tracked object
Design and Implementation of Fuzzy PID Controller into Multi Agent Smart Library System Prototype
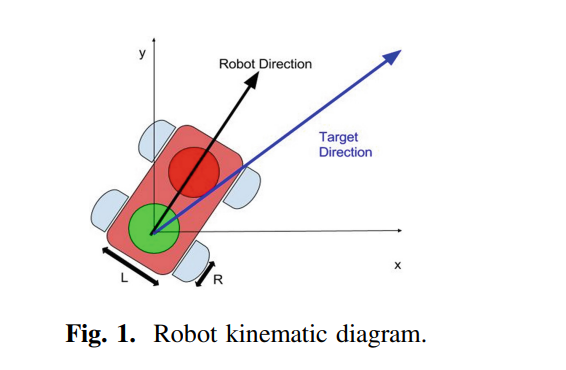
This paper compares the performance of four different controllers implemented on two multi agent robots to stabilize its motion from one station to another during delivery tasks. The controllers are; multi-position controller, PID controller, fuzzy logic controller and fuzzy-PID controller. The aim of this paper is to control the mobile robot robustly to arrive its target destination. The robots and station coordinates are recognized using machine vision system and all programming is carried out in LabVIEW. The paper compares the transient response and steady state error of each of controller

Effect of the wall thermal boundary condition on the structure of a confined swirling diffusion flame
The present study focuses on the effect of the wall heat loss on a confined swirling diffusion flame. The objective is to assess the effect of changing the wall thermal boundary condition (i.e., from isothermal to adiabatic) on the flow structure, the flame shape, and the mixing behavior. Reynolds-averaged Navier–Stokes equations are solved. The diffusion flamelet model is employed in the simulation. The comparison of the numerical and experimental axial wall heat flux distributions shows a good agreement. The inner recirculation zone (IRZ) is shorter in the case of the adiabatic wall. It

An improved generic Johnson-Cook model for the flow prediction of different categories of alloys at elevated temperatures and dynamic loading conditions
This paper presents a generic model for material flow prediction based on the well-known Johnson-Cook model. The model is developed to precisely predict the flow behavior of various categories of alloys. The coupled effects between strain, strain rate, and temperature were taken into consideration. The proposed model is developed and assessed using the hot deformation data of four different categories of alloys; with four different base elements. Besides, the data of two different alloys under dynamic loading are used for assessment. The proposed modification is compared to the original

A 3D-convolutional neural network framework with ensemble learning techniques for multi-modal emotion recognition
Nowadays, human emotion recognition is a mandatory task for many human machine interaction fields. This paper proposes a novel multi-modal human emotion recognition framework. The proposed scheme utilizes first the 3D-Convolutional Neural Network (3D-CNN) deep learning architecture for extracting the spatio-temporal features from the electroencephalogram (EEG) signals, and the video data of human faces. Then, a combination of data augmentation, ensemble learning techniques is proposed to get the final fusion predictions. The fusion of the multi-modalities in the proposed scheme is carried out

An energy-utilization metric for heat transfer devices
A new metric for measuring the performance of heat transfer devices, which require the consumption of mechanical power to function, is proposed. The proposed Energy-Utilization Metric, EUM, is derived to quantify the achieved heat transfer rate per unit consumed mechanical power. By virtue of its definition, using the EUM as a preference metric between different heat transfer devices guarantees the selection of the design with the best energy-utilization characteristics or in other words the device which meets the required heat load with the minimum amount of consumed pumping power. The