
Steering Control for Autonomous Vehicles Using PID Control with Gradient Descent Tuning and Behavioral Cloning
In this paper we implement and evaluate two ways of controlling the steering angle of an autonomous vehicle, PID control with manual tuning followed by gradient descent algorithm tuning-which is able to enhance the performance through self-adjusting the controller parameters-and using supervised machine learning through the end-to-end deep learning for self-driving car which implement Convolutional Neural Network (CNN) to predict the steering angle for a given instance of a track. The verification testing went through two phases: software simulation using python for first run testing and C++

Lid-Driven Cavity Flow with Elliptic Obstacle at Different Orientations
The aim of the present work is to predict the flow field around an elliptic obstacle at different orientations inside a square Lid-Driven Cavity (LDC). The Lattice Boltzmann Method (LBM) is used to simulate the flow at a Reynolds number, Re, of 100, using the two-dimensional nine-velocity, (D2Q9) lattice configuration and the BGK collision operator. The in-house code is validated using data from the literature for the case of LDC with a central circular cylinder. Different ellipse orientations are tested (0°, 30°, 45°, 90°, 120°, 145°, and 150°) to check the effect of orientation on the vortex
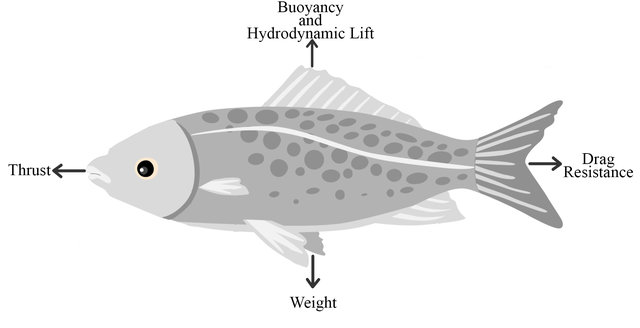
Underwater Soft Robotics: A Review of Bioinspiration in Design, Actuation, Modeling, and Control
Nature and biological creatures are some of the main sources of inspiration for humans. Engineers have aspired to emulate these natural systems. As rigid systems become increasingly limited in their capabilities to perform complex tasks and adapt to their environment like living creatures, the need for soft systems has become more prominent due to the similar complex, compliant, and flexible characteristics they share with intelligent natural systems. This review provides an overview of the recent developments in the soft robotics field, with a focus on the underwater application frontier. ©
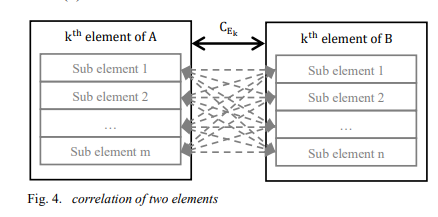
Systematic university decision making based on footprint identifiers
A new systematic decision-making framework for universities is presented. The framework avoids the disadvantages of the balanced score cards technique. A solid mathematical technique is provided for mapping processes and quality items. Application to the Egyptian system is fully explained. The footprint concept developed within an international initiative is introduced. The mathematical correlation algorithm main output is a decision matrix matching processes and quality aspects. Results illustrate automatic suitable matching between processes and quality standards. © 2021 IEEE.
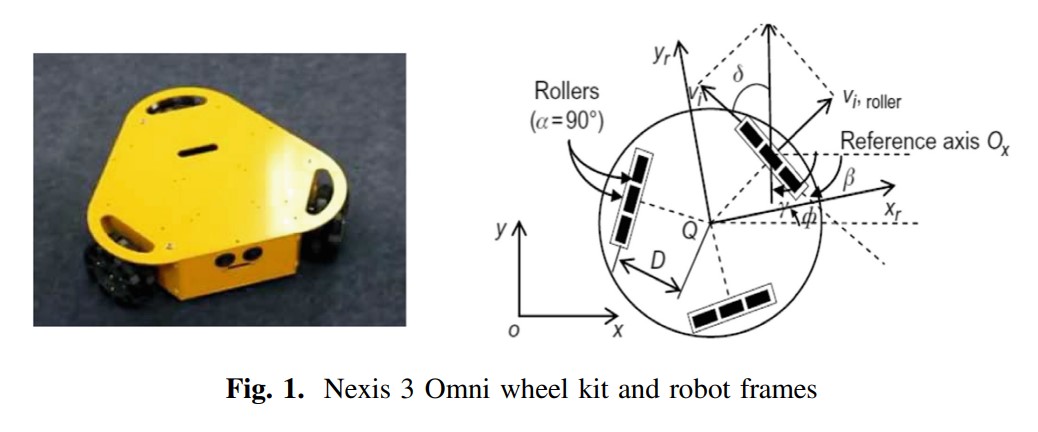
Path Planning Control for 3-Omni Fighting Robot Using PID and Fuzzy Logic Controller
This paper addresses a comparison between some control methods of three Omni wheels firefighting robot due to the variety of maneuverability. To achieve path planning for firefighting robot to reach a specific point with the shortest path, a kinematics model of omni wheel robot is applied with some control algorithms based on PID controller, Fuzzy logic controller and self-tuned PID using fuzzy logic techniques. Hardware prototype has been tested to validate the simulation results. © 2020, Springer Nature Switzerland AG.
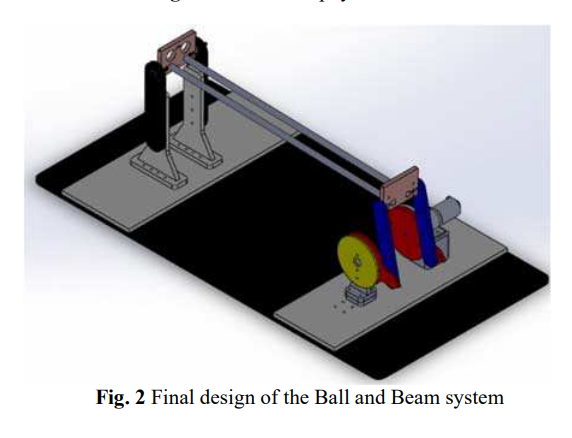
Design and Implementation of a Ball and Beam PID Control System Based on Metaheuristic Techniques
The paper introduces a comparative analysis between three meta-heuristic techniques in the optimization of Proportional-Integral-Derivative (PID) controller for a cascaded control of a ball and beam system. The meta-heuristic techniques presented in this study are Particle Swarm Optimization (PSO), Artificial Bee Colony (ABC) and Bat Algorithm Optimization (BAO). The model uses a DC motor with encoder to move the beam and a camera as a feedback for the ball position on the beam. The control theory of the system depends on two loops; the first (inner) loop is the DC motor for position control

Two-wheeled Self balancing robot Modeling and Control using Artificial Neural Networks (ANN)
This paper is focusing on the problem of the Self balancing robot which has many potentials due to its power consumption and maneuverability advantages. Modelling and controlling of the two-wheeled self-balancing robot is presented. For modelling part, two models were used in compare with a real proposed robot. At first, mathematical model was driven and the state space was achieved to model the plant of the system. Second, Nonlinear Autoregressive Exogenous (NARX) Neural Network model is introduced using recorded data architecture-based as it is used in time-series modeling for many reported
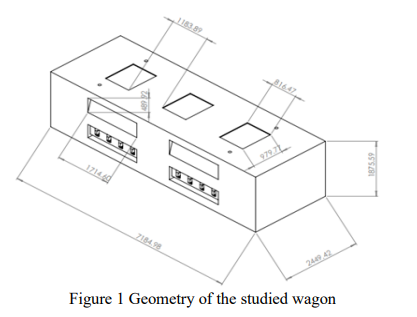
Regression Modeling for the Ventilation Effect on COVID-19 Spreading in Metro Wagons
The effect of different ventilation parameters on the infection potential of COVID-19 in a metro wagon is numerically studied. Two key indicators are used to quantify this potential. Based on the numerical results a regression analysis is performed to come up with the most suitable regression model for these key parameters. The proposed regression models are helpful in quantifying the infection risk at different ventilation scenarios. © 2021 IEEE.
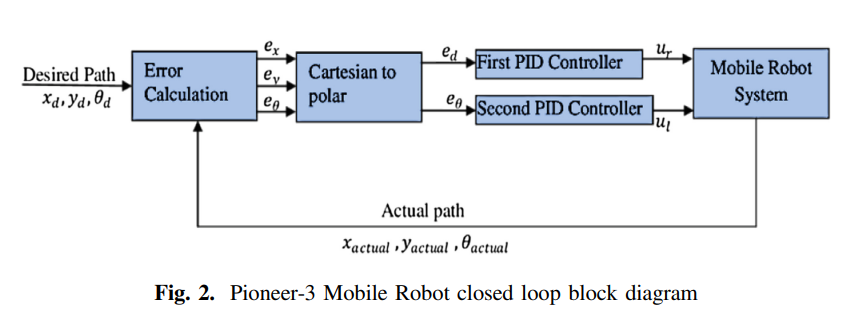
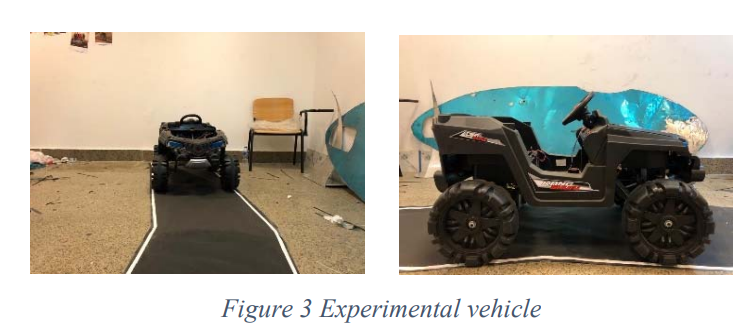
Robust Path Tracking of Mobile Robot Using Fractional Order PID Controller
This paper represents the control of the Pioneer-3 Mobile Robot as a complex non-linear system which provides an object for research nonlinear system kinematics and dynamics analysis. In this paper, the system modeling and simulation is divided into two main parts. The first part is the modeling and simulation using MATLAB and the second part is the whole mechanical design and its characteristics as a function of the motor speed and the torque depending on the system using Virtual Robot Environment Program (V-REP). The study uses Proportional–Integral–Derivative (PID) and Fractional Order PID
Optimal Design of PID Controller for 2-DOF Drawing Robot Using Bat-Inspired Algorithm
Tuning process which is used to find the optimum values of the proportional integral derivative (PID) parameters, can be performed automatically using meta-heuristics algorithms such as BA (Bat Algorithm), PSO (Particle Swarm Optimization) and ABC (Artificial Bee Colony). This paper presented a theoretical and practical implementation of a drawing robot using BA to tune the PID controller governing the robotic arm which is a non linear system difficult to be controlled using classical control. In line with the above and in order to achieve this aim and meet high performance feedback and robust