Developing a Floating Robot for Mechanical Control of Water Hyacinth
Abstract
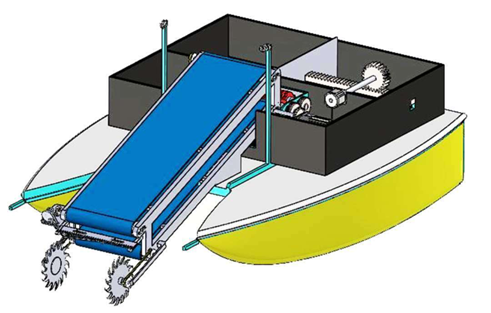
Water hyacinth has become widespread in freshwater bodies in several countries, leading to various issues, particularly its substantial water consumption and the resulting need to control its growth. Among the different methods of controlling water hyacinth, mechanical control stands out as the most effective and environmentally friendly approach. A proposed harvester robot has been developed, capable of efficiently cutting and collecting water hyacinth from the water's surface. The robot boasts several advantages, including its ability to operate in narrow water paths and lakes, use clean energy sources to preserve the water ecology, employ a GPS module for safety and error detection, and generate maps for evaluating work and predicting annual growth. When compared to other technologies dealing with water hyacinth, this innovative water hyacinth harvesting robot presents a significantly lower cost of 0.01 $/kg, making it an optimal solution for addressing water hyacinth problems.
Partners
Dr. Mostafa Rashed (MUST, Egypt) and Dr. Mostafa Elsayed (Benha Uni)