
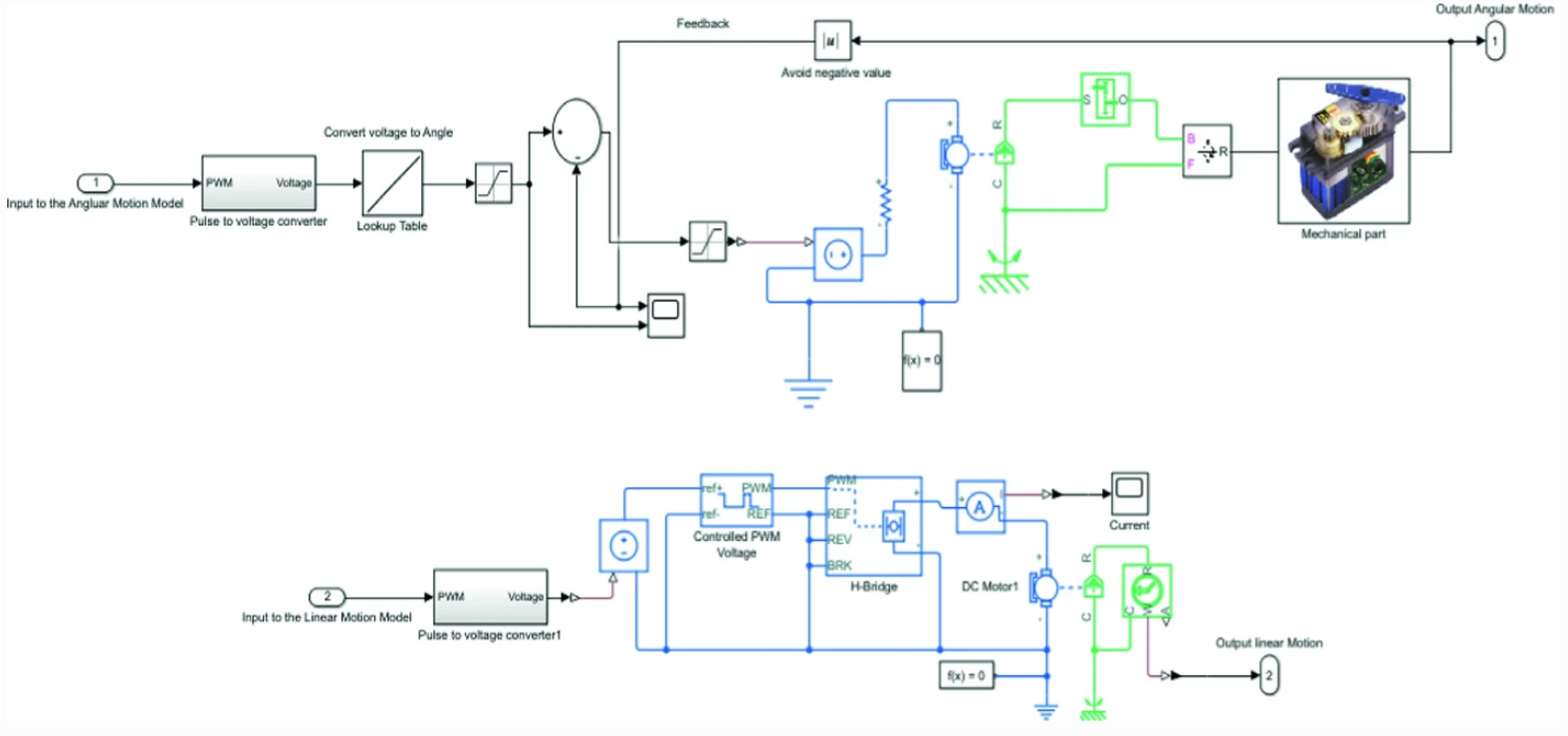
Implementation of PID Controller with PSO Tuning for Autonomous Vehicle
In the use of automatic control and its optimization methods, this research discusses how Proportional Integral Derivative (PID) controller is used to provide a smooth auto-parking for an electrical autonomous car. Different tuning methods are shown, discussed, and applied to the system looking forward to enhancing its performance. Time domain specifications are used as a criterion of comparison between tuning methods in order to select the best tuning method to the system with a proper cost function. Results show that Particle Swarm Optimization (PSO) method gives the best results according
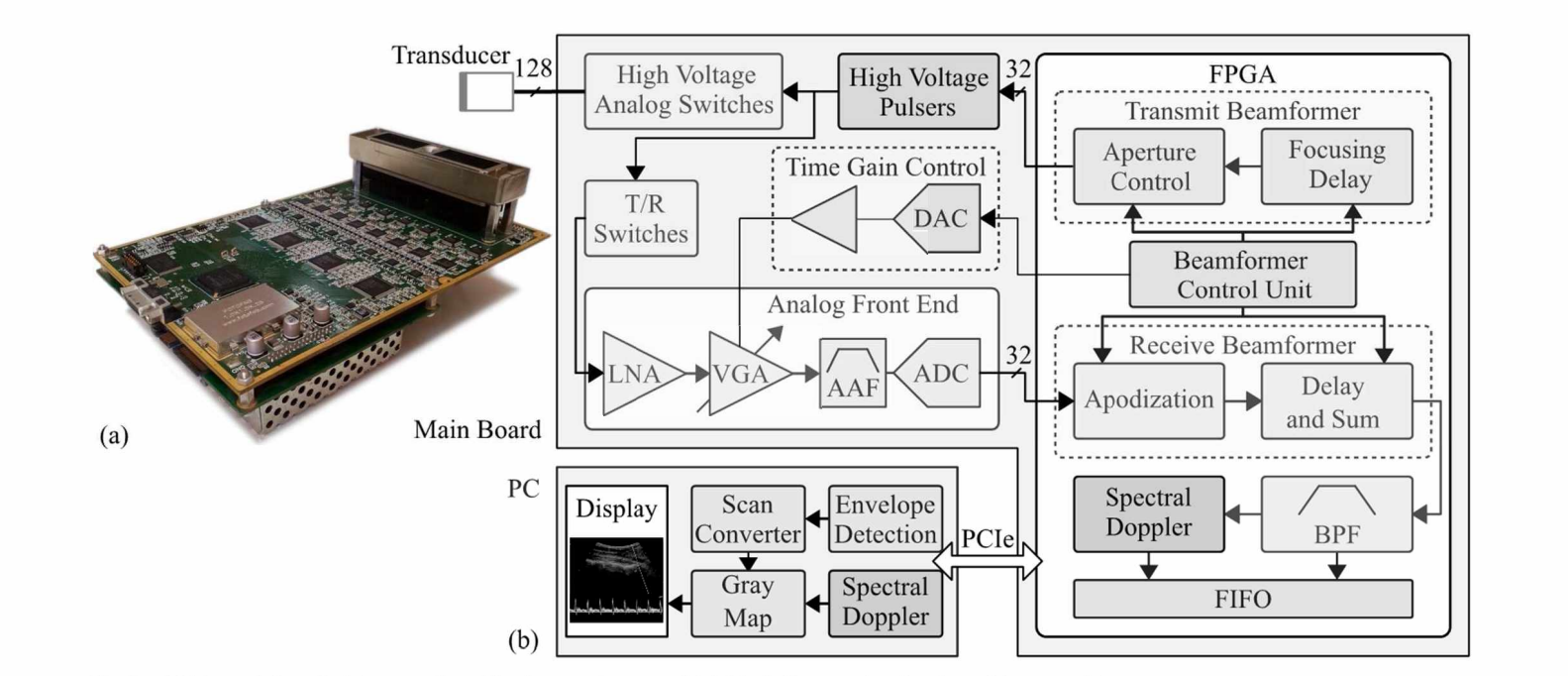
Implementation of a Pulsed-Wave Spectral Doppler Module on a Programmable Ultrasound System
Pulsed wave Doppler ultrasound is commonly used in the diagnosis of cardiovascular and blood flow abnormalities. Doppler techniques have gained clinical significance due to its safety, real-time performance and affordability. This work presents the development of a pulsed wave spectral Doppler module, which was integrated into a reconfigurable ultrasound system. The targeted system adopts a hardware-software partitioning scheme where an FPGA handles the front-end and a PC performs the back-end. Two factors were considered during the design. First, the data transfer rate between hardware and
Incremental Grounded Voltage Controlled Memristor Emulator
Memristor has become an interesting research subject in the recent years. Its special behavior has attracted the attention of the research community that motivated researchers to investigate it in details. As memristor is a relatively new electrical element, it is not yet available in the market as a solid state component Researchers found their way to build memristor emulators to achieve its pinched hysteresis. While many papers proposed floating emulators, only a few papers presented a grounded one. In this paper, an incremental grounded memristor emulator is proposed. The mathematical model
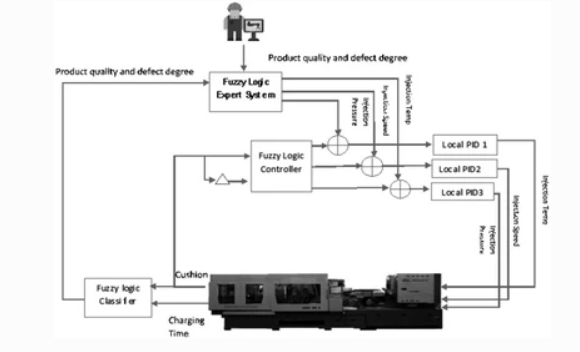
Improved Production Key Performance Indicators (KPI’s) Using Intelligent-Manufacturing Execution Systems (I-MES)
The aim of this research is to reduce the gap between manufacture expertise and management expertise by using modern technology like Manufacturing Execution System (MES) via Artificial Intelligence (AI) and Machin Learning (ML). A design of MES has been proposed and implemented on El-Araby Plastic Injection Molding (PIM) factory. This work is based on the International Society of Automation Standard (ISA-S95). A fully automated data management system has been designed and implemented to control data follow between shop floor e.g. (machines and operators) and management floor e.g. (production
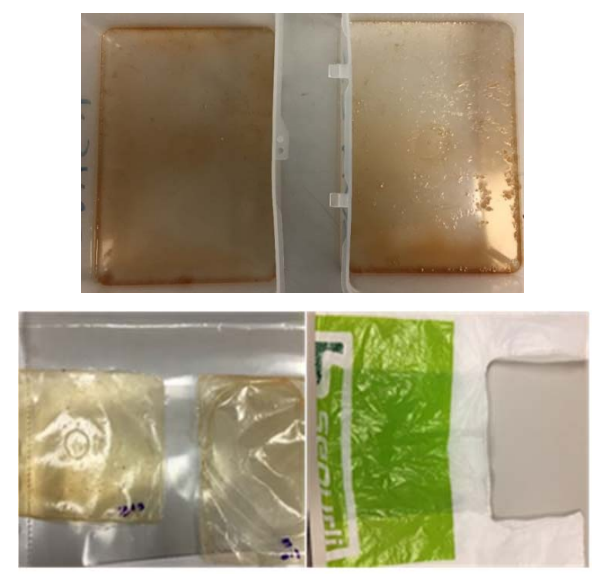
Mechanical behavior optimization of chitosan extracted from shrimp shells as a sustainable material for shopping bags
The use of biodegradable materials for shopping bag production, and other products made from plastics, has recently been an object of intense research-with the aim of reducing the environmental burdens given by conventional materials. Chitosan is a potential material because of its biocompatibility, degradability, and non-toxicity. It is a semi-natural biopolymeric material produced by the deacetylation of chitin, which is the second most abundant natural biopolymer (after cellulose). Chitin is found in the exoskeleton of insects, marine crustaceans, and the cell walls of certain fungi and
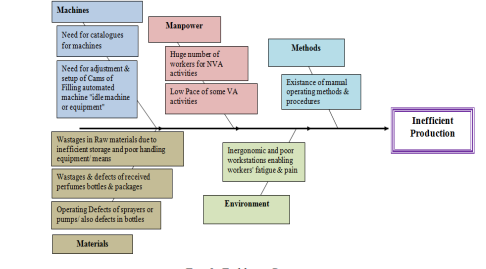
Improving Productivity of A Production Line in Perfumes Industry in Egypt Using Lean Manufacturing Methodology
This study presents proposed solutions for increasing the productivity of a production line in the perfumes industry in Egypt using lean manufacturing methodology. Enhancing efficiency is a major significant objective to consider in a typical manufacturing firm to improve the overall performance. Increasing productivity is achieved through applying an extensive lean program implementing appropriate lean tools to solve problems identified as wastage in materials and activities as well as bottlenecks increasing lead time. Information of current problems and gaps are gathered through visits and
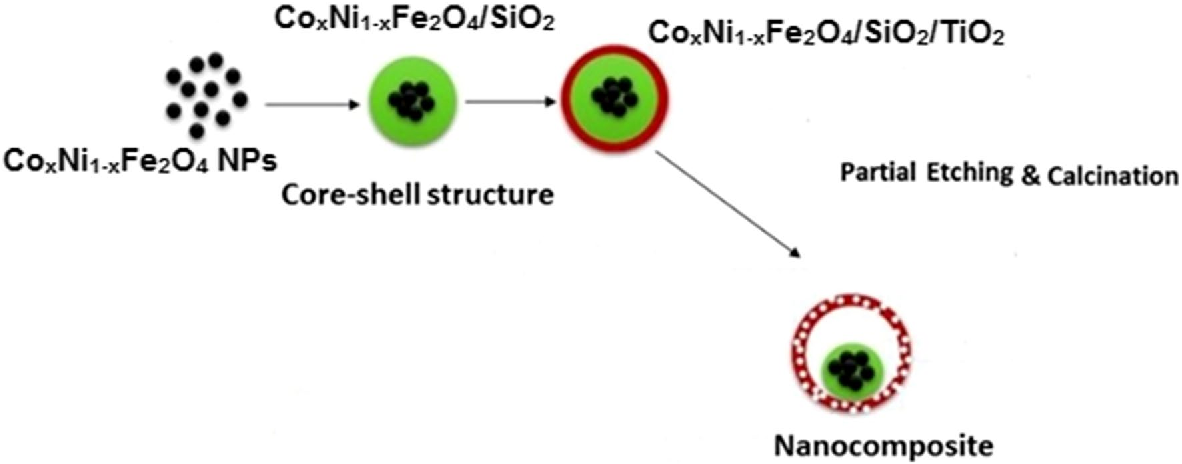
Layer-by-layer preparation and characterization of recyclable nanocomposite (CoxNi1−xFe2O4; X = 0.9/SiO2/TiO2)
Titanium dioxide (TiO2) nanocomposites have been extensively employed in many fundamental optoelectronic and photocatalytic applications due to their outstanding optical, electronic and chemical properties. In the present work, we introduce a simple layer-by-layer approach to design a magnetic TiO2 nanocomposite that could be easily recycled using an external magnetic field without affecting its quantum efficiency. The crystallinity, size, surface area, stability, morphology, purity and other optical, thermal and magnetic properties of the composite have been investigated. Surface topology
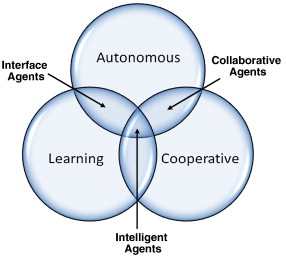
Agent-based simulation of urban infrastructure asset management activities
This paper presents a case for adopting agent-based modeling (ABM) as a framework for representing the complex interactions that occur within the context of urban infrastructure management. A generic ABM is proposed with four key agents namely; assets, users, operators and politicians. For each agent a set of generic attributes, actions and behaviors are defined. A detailed behavioral model is adapted from the service quality domain to represent customer perceptions and actions related to infrastructure level of service. An illustrative example of 20 assets and 50 user agents is simulated to
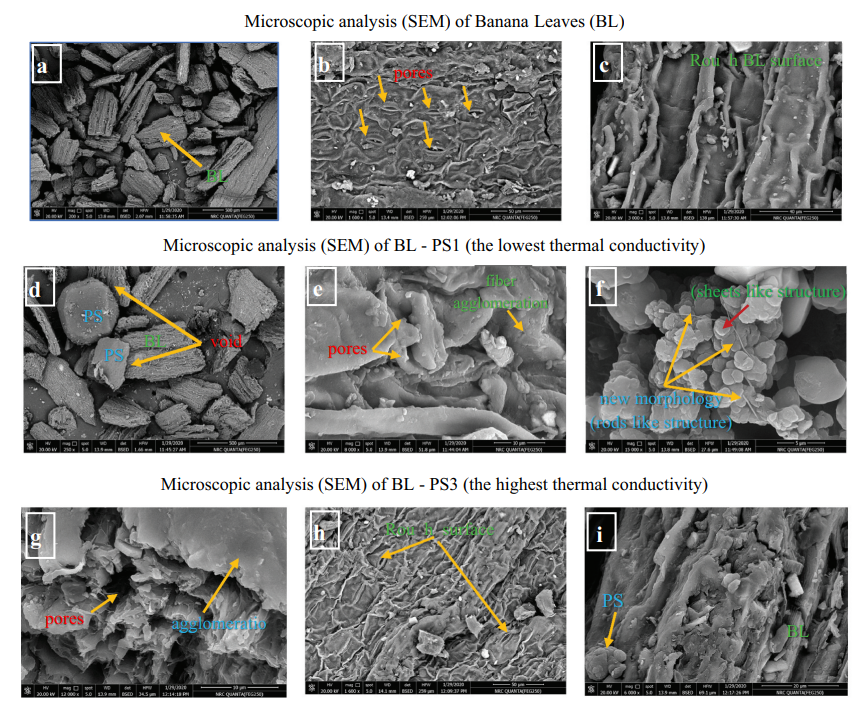
Bio-composite Thermal Insulation Materials Based on Banana Leaves Fibers and Polystyrene: Physical and Thermal Performance
Thermal insulators have a crucial role in reducing the operational building energy. They are commonly fabricated from petrochemical materials that mostly cause negative environmental impacts. This study aims to develop banana leaves-polystyrene composites (BL-PS) as a sustainable and low-cost thermal insulator. The BL powder was mixed with PS in different weight ratios (90:10, 80:20, 70:30, and 60:40). Thermal conductivity, electrical conductivity, SEM, XRD, FTIR, TGA, and DSC were carried out on BL and BL-PS composites that were prepared with 10 wt.% of PS powder (BL-PS1) and 30 wt.% of PS
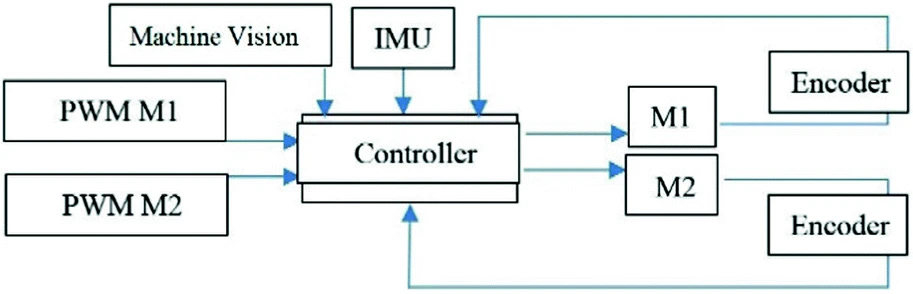
Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool for complex nonlinear system, the second is using MATLAB software system Identification Tool. The study Uses PID, Fuzzy logic controller and fuzzy self-tuning of PID controller to control the path