

Centralized Multi-agent Mobile Robots SLAM and Navigation for COVID-19 Field Hospitals
In this paper we focus on the proof of concept prototype of fully autonomous centralized Multi-Robot System (MRS) consisting of a Hexapod walking robot and a six wheeled mobile robot. Recently, there has been an increasing demand for such systems as they can be involved in several tasks such as collaborative search and rescue, surveillance, monitoring, and disinfecting Field hospitals. To name a few, COVID-19 pandemic showed the weak points in the medical sector around the world, including those in the most advanced nations that had to go through hard decisions due to the lack of medical
Ergonomic analysis of a working posture in steel industry in Egypt using digital human modeling
This study presents solutions for improving a bending awkward posture in steel industry in Egypt using digital Human Modeling (DHM). The information is gathered by interviewing the workers, working postures are recorded via a video camera while the worker is performing his usual work. The postures are analyzed using DHM software. Porter comfort analysis and Rapid Upper Limb Assessment are applied for postures analysis. The analysis shows high levels of discomfort in neck, trunk, leg and forearm. These discomforts could cause permanent injuries over long periods. A modified design is proposed
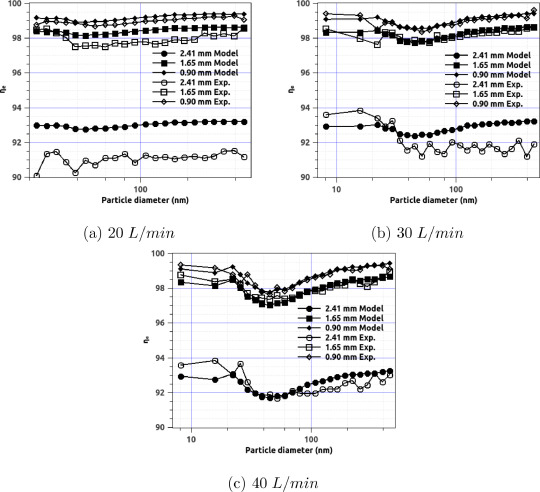
An analytical model for the effective filtration efficiency of single and multiple face masks considering leakage
An analytical model for the filtration efficiency of face masks is developed. The model considers the effect of gap leakage due to the improper fitting of the face mask in the reduction of the effective filtration efficiency. The model is also extended to include the case with multiple face masks. The model results are verified using experimental data from literature. It is shown that the adverse effect of the gap leakage depends on the face mask filtration and leakage characteristics. It is also shown that wearing more than one face mask might not always be beneficial in some scenarios
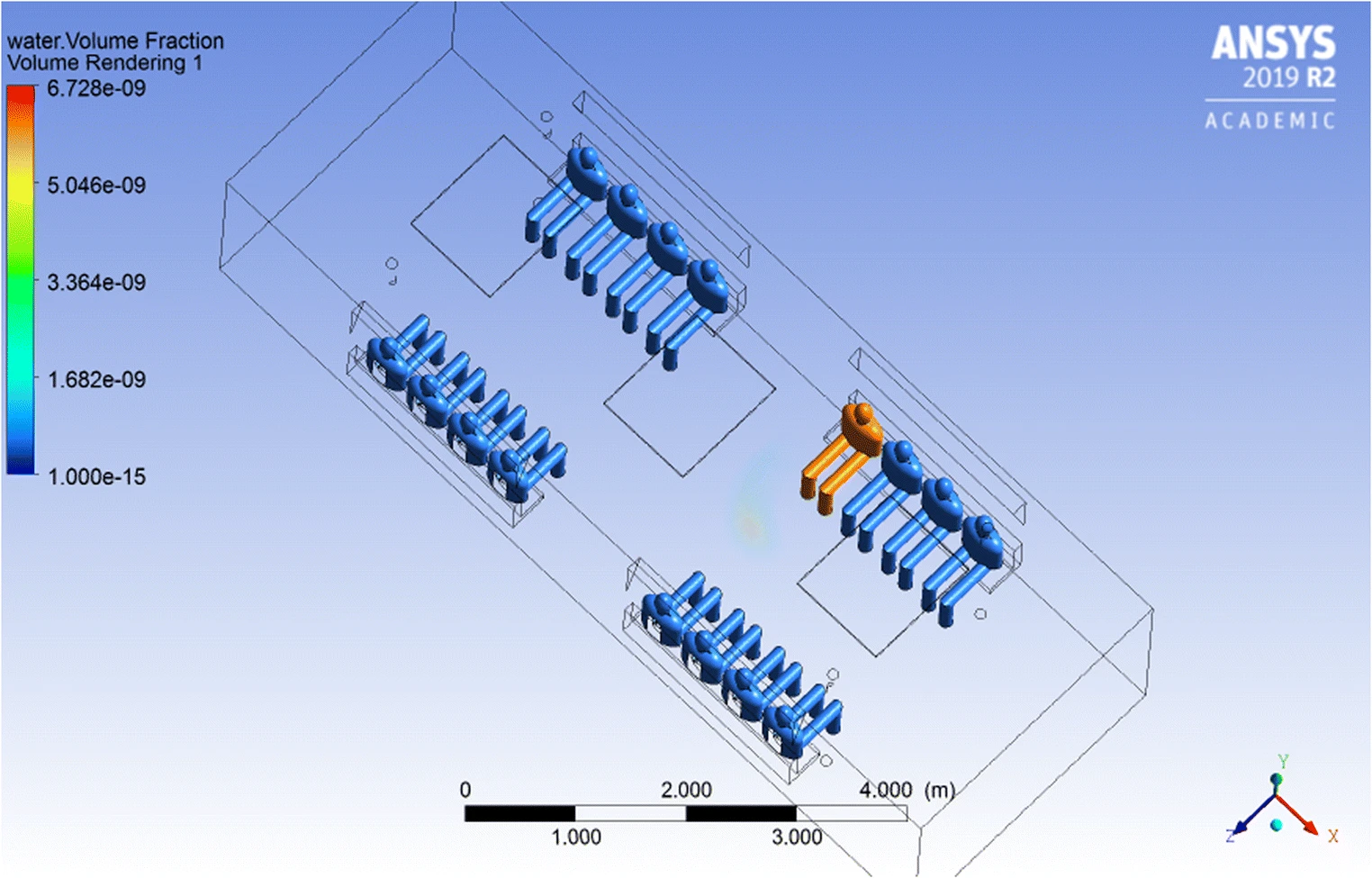
Air change rate effects on the airborne diseases spreading in Underground Metro wagons
The effect of the rate of change of fresh air inside passengers’ wagons for Underground Metro on the spreading of airborne diseases like COVID-19 is investigated numerically. The study investigates two extreme scenarios for the location of the source of infection within the wagon with four different air change rates for each. The first scenario considers the source of infection at the closest point to the ventilation system while the other places the infection source at the farthest point from the wagon ventilation system. The effect of the wagon windows’ status (i.e. closed or open) is also
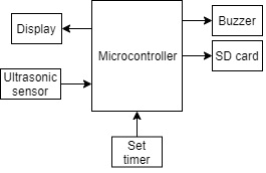
Simulation of vitiligo therapy equipment
Vitiligo is a skin disorder caused by a lack of melanin pigment in the skin, which causes white patches on certain parts of the skin because this melanin pigment is not able to produce the skin color. Previously, one of the treatments for vitiligo was using a UVB lamp with a 311 nm wavelength that could not yet be adjusted to dim the lights as safety when conducting therapy. Therefore, the research aims to design a simulation of the vitiligo therapy device equipped with a timer LED lamp, a safety of lighting, and the data storage. The data are stored in the SD Card to make it easier for
Medical nanorobots: Design, applications and future challenges
Following the current technological revolution, the concept of emerging fields and getting a common benefit becomes a bright way to follow. Going deeper in nanotechnology, nanorobotics has been the glimpse of hope in many fields; particularly, in the medical field. Nanorobotics applications in medicine are divided into two main categories, diagnosis and treatment, and extensive efforts have been given to research about its operation principles and design. Unfortunately, problem have emerged regarding the implementation, methods of actuation, and customized components of nanorobotics to be used
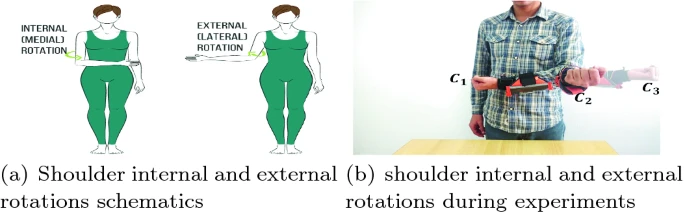
Classifying Upper Limb Activities Using Deep Neural Networks
This paper presents a classification method using Inertial Measurement Unit (IMU) in order to classify six human upper limb activities. The study was also carried out to investigate whether theses activities are being performed normally or abnormally using two different neural networks: Artificial neural network (ANN) and convolutional neural network (CNN). Human activities that were included in the study: arm flexion and extension, arm pronation and supination, shoulder internal and external rotations. Before activities categorization, training data was obtained by the means of an IMU sensor
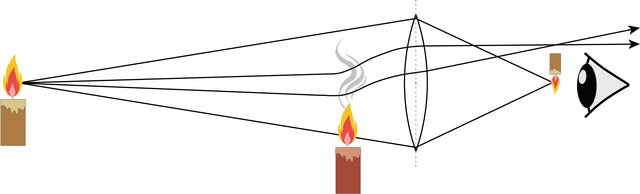
Design of a Schlieren System for Visualization of Heat and Mass Transfer
In this contribution, a simple yet effective design for Schlieren photography system is described and implemented. The proposed system is used in the visualization of both heat and mass transfer phenomena. Refractive index gradient is created by a lighter to study mass transfer, then the lighter is ignited to create temperature gradient. Results show the ability of the proposed system in capturing the gradients in both mass and temperature gradients. © 2020 IEEE.
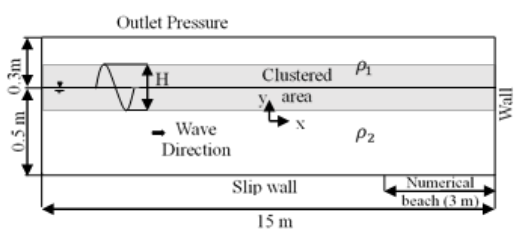
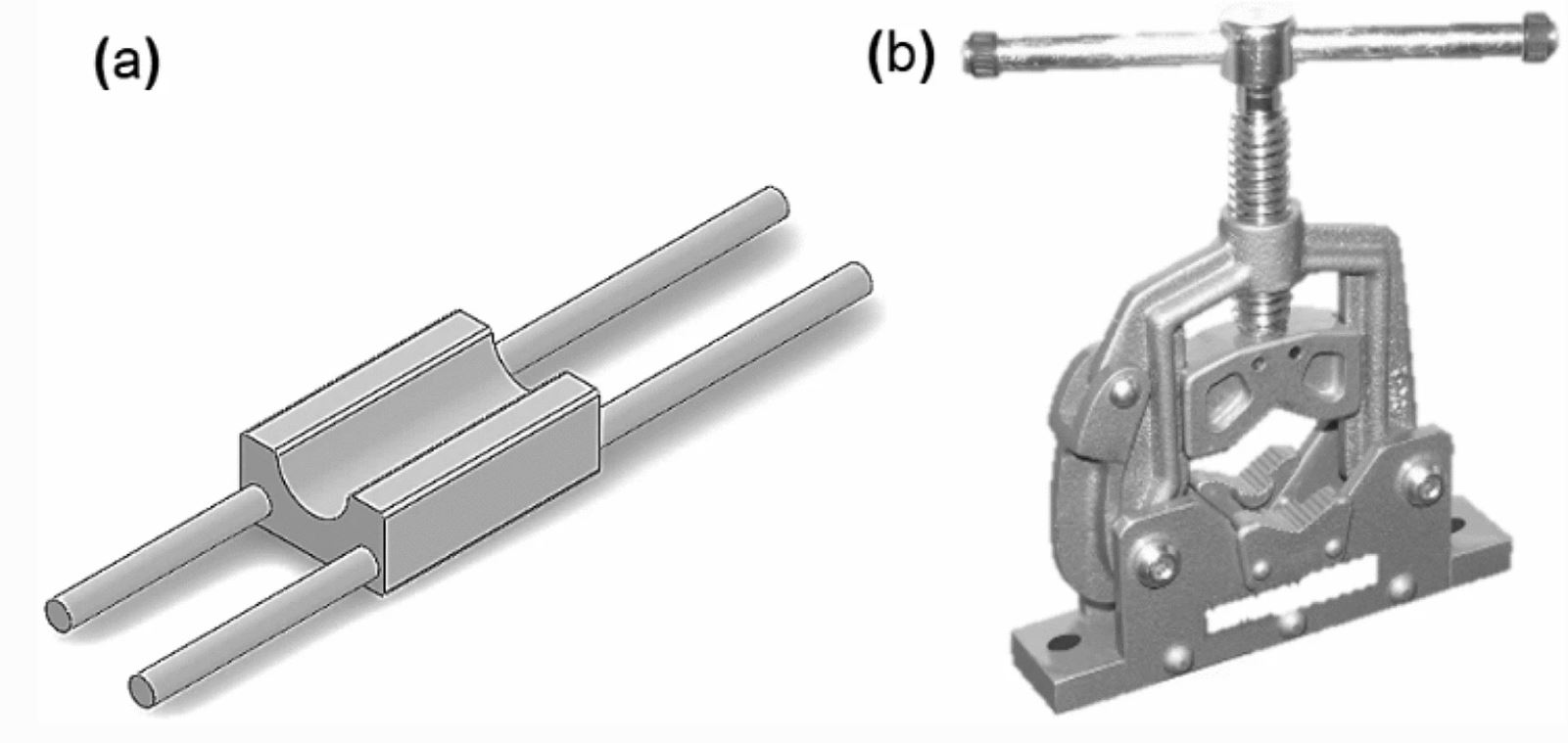
Simulation of Water Wave Interaction with Large Submerged Square Obstacles
Water waves propagation over submerged obstacles is considered. The problem serves as an efficient model for modeling breakwaters. A numerical wave tank is developed to simulate the induced flow field. The model is based on multiphase viscous flow assumptions. Computations are performed adopting clustered grids and suitable initial and boundary conditions. The results are verified using the flow field particle image velocimetry (PIV) measurements. Spatial and temporal resolutions are validated. Complex flow phenomena occurring due to the presence of the relatively large sized obstacle are
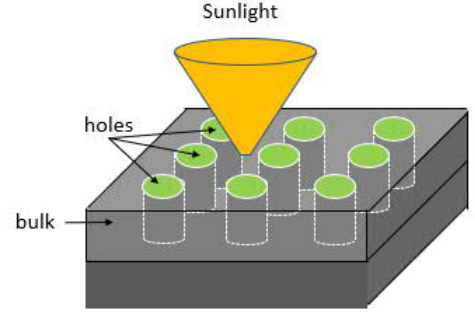
Modified P3HT:PCBM Active Material with LiF Vertical Cylinders for Organic Solar Cells
In this paper, we introduce active material for an organic solar cell with a modified composition. A combination of P3HT: PCBM with parallel vertical LiF cylinders formulate the active material structure. The collection efficiency in the active material reaches 92.2%. The operating wavelength where the maximum collection efficiency occurs is adjusted and matched with the wavelength where the maximum irradiance of the solar spectrum occurs. The absorption per unit volume of the new structure is 80.4 μm-3 while the blank structure is 75.07 μm-3. The net absorption magnitude for the required