
Filter by
Biohybrid soft robots, E-skin, and bioimpedance potential to build up their applications: A review
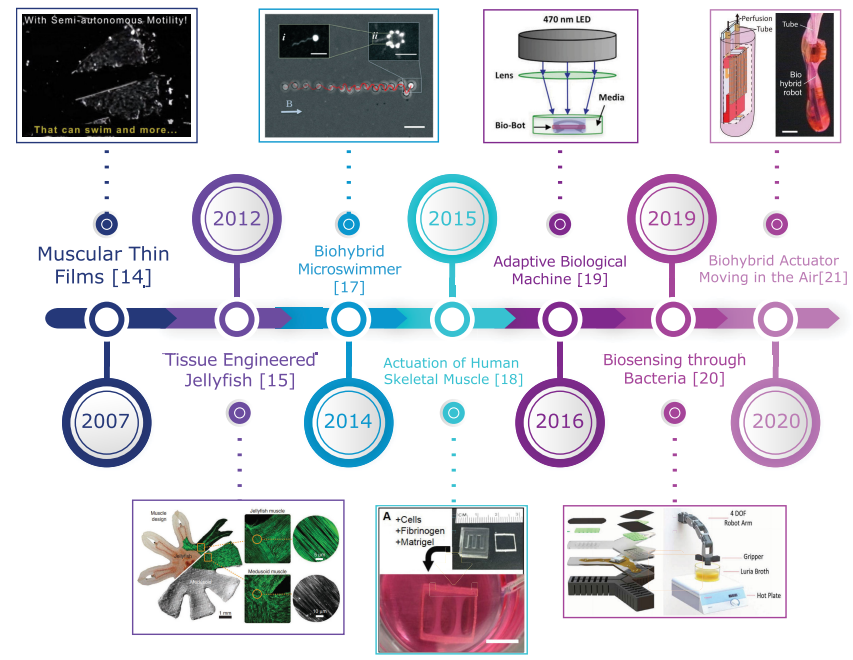
Soft Robotics is a new approach towards better human-robot interaction and biomimicry in the robotics field. Its integration with biological materials (Biohybrid soft robotics) is one of the topics being focused on in the soft robotics research in the last fifteen years. The motive for this approach is to combine the best of biological and artificial systems. In this article, Biohybrid soft robots

A Neuro-Fuzzy Based Approach for Energy Consumption and Profit Operation Forecasting
In recent years, the massive growth in the scale of data is being a key factor in the needed data processing approaches. The efficiency of the algorithms of knowledge extraction depends significantly on the quality of the raw data, which can be improved by employing preprocessing techniques. In the field of energy consumption, the forecasting of power cost needed plays a vital role in determining

Gray Wolf Optimization of Fractional Order Control of 3-Omni Wheels Mobile Robot: Experimental Study
Committing robotics with artificial intelligence becomes mandatory collaboration with distinct environments. Omnidirectional Wheeled (Omni-WD) mobile robots are one of the robots that interact with humans in various circumstances, where it is important to function effectively and accurately. In this paper, the distinction of a 3WD-Omni model and control using machine vision is demonstrated. The

Enhanced hardware implementation of a mixed-order nonlinear chaotic system and speech encryption application
This paper introduces a study for the effect of using different floating-point representations on the chaotic system's behaviour. Also, it offers a comparison between the attractors at three different orders, (integer, fractional, and mixed-order). This comparison shows the minimum number of bits needed for all parameters to simulate the chaotic attractor in each case. Numerical simulations using
Ergonomic analysis of a working posture in steel industry in Egypt using digital human modeling
This study presents solutions for improving a bending awkward posture in steel industry in Egypt using digital Human Modeling (DHM). The information is gathered by interviewing the workers, working postures are recorded via a video camera while the worker is performing his usual work. The postures are analyzed using DHM software. Porter comfort analysis and Rapid Upper Limb Assessment are applied
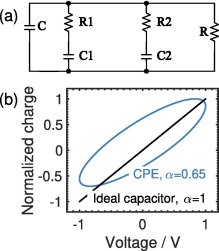
Nonlinear charge-voltage relationship in constant phase element
The constant phase element (CPE) or fractional-order capacitor is an electrical device that has an impedance of the form Z(s)=1/Cαsα, where Cα is the CPE parameter and α is a fractional dispersion coefficient of values between 0 and 1. Here we show that in the time-domain the classical linear charge-voltage relationship of ideal capacitors, q=C·v, is not valid for CPEs. In fact the relationship is

FPGA Implementation of Delayed Fractional-Order Financial Chaotic System
This paper proposes digital design and realization on Field-Programmable Gate Array (FPGA) of the Fractional-order (FO) delayed financial chaotic system. The system is solved numerically using the approximated Grünwald-Letnikov (GL) method. For the purpose of FPGA realization, the short memory principle and an approximate GL with limited window size are utilized. Lookup Tables (LUTs) are employed
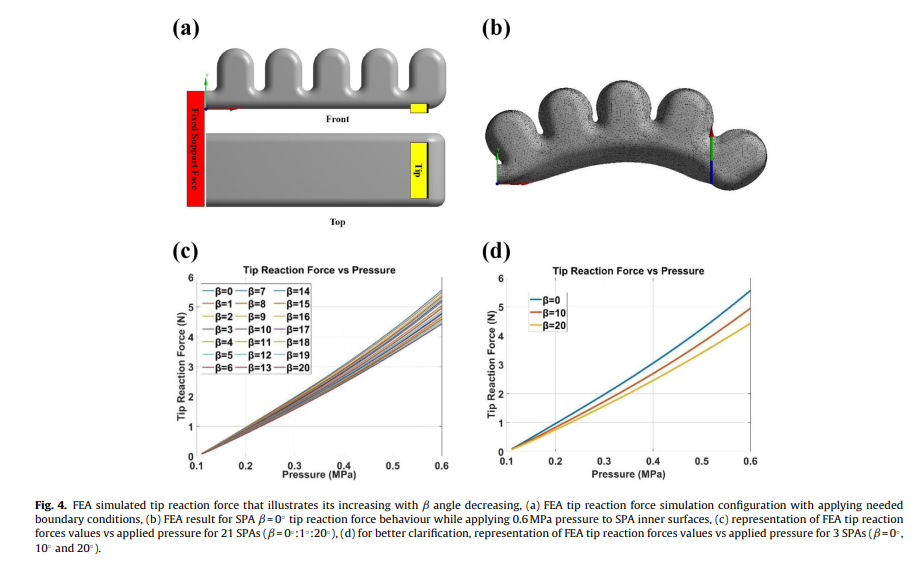
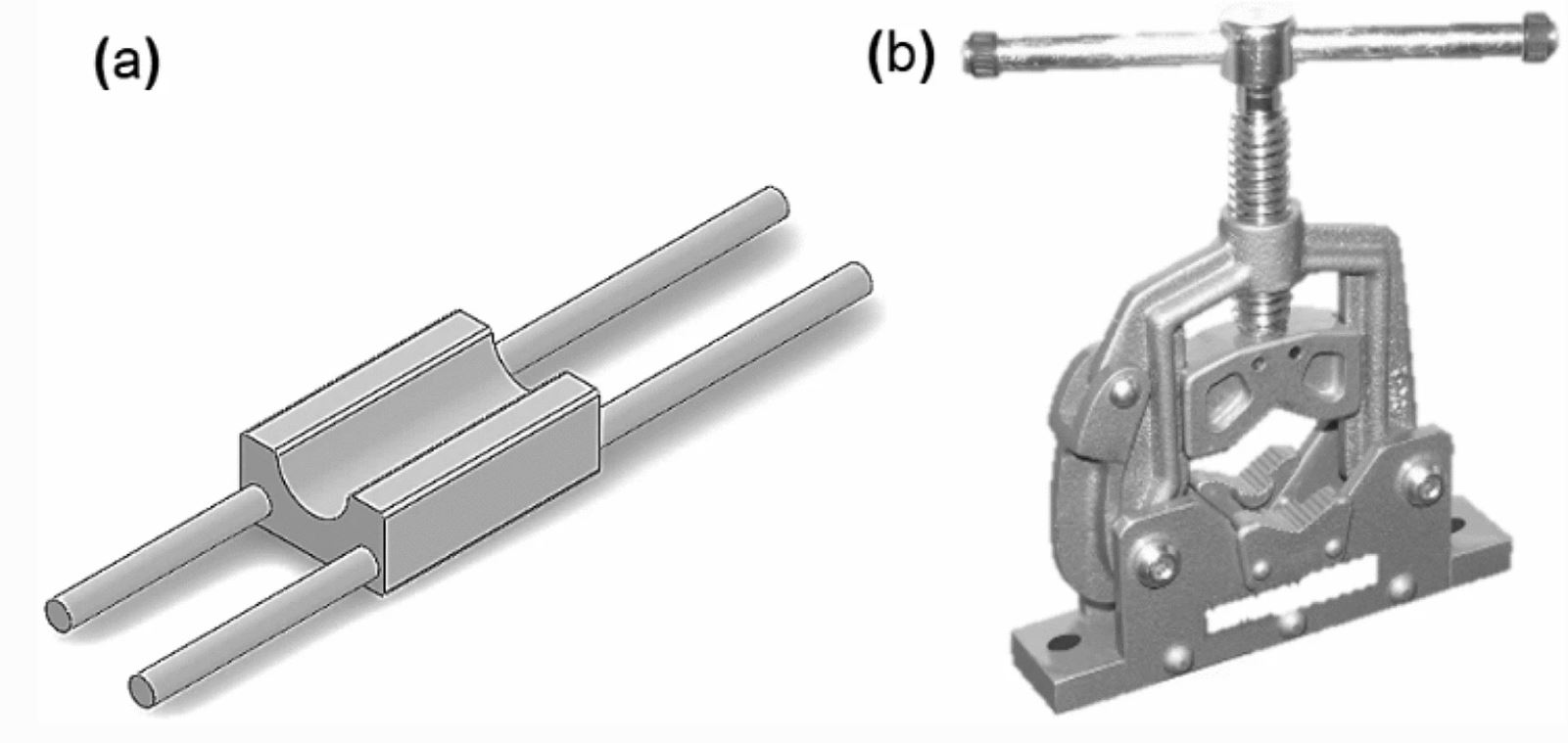
Design and implementation of variable inclined air pillow soft pneumatic actuator suitable for bioimpedance applications
The technological revolution has caused the modernization of human–machine relationship changing our approach in problem solving our society issues and deviated the science of robotic all together. An example for one of the most important pawn in this revolution is soft robotics, the soft robots are robots that are made of deformable materials that provide an alternative approach to rigid robots

Centralized Multi-agent Mobile Robots SLAM and Navigation for COVID-19 Field Hospitals
In this paper we focus on the proof of concept prototype of fully autonomous centralized Multi-Robot System (MRS) consisting of a Hexapod walking robot and a six wheeled mobile robot. Recently, there has been an increasing demand for such systems as they can be involved in several tasks such as collaborative search and rescue, surveillance, monitoring, and disinfecting Field hospitals. To name a
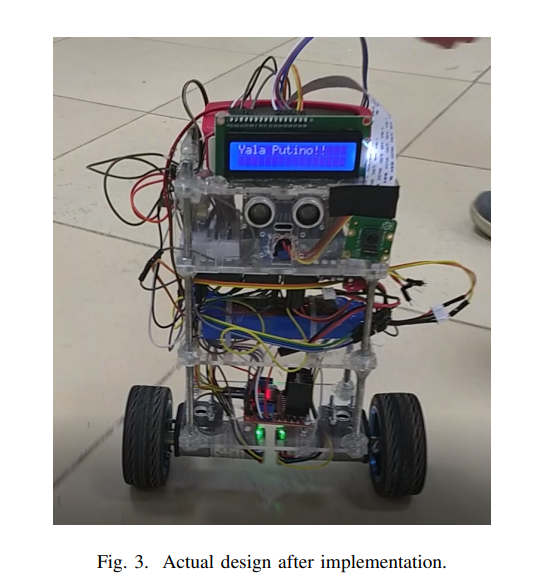
Hybrid Self-Balancing and object Tracking Robot Using Artificial Intelligence and Machine Vision
Over the past decade, mobile autonomous robots have been widely used efficiently for different applications. Recently, self-balancing robots attracted more attention and showed impressive performance. A self-balancing robot is simply a two-wheeled robot; hence it needs to be balanced vertically using a closed-loop control algorithm. In this paper, a new hybrid two-wheeled self-balancing robot is