Hybrid Self-Balancing and object Tracking Robot Using Artificial Intelligence and Machine Vision
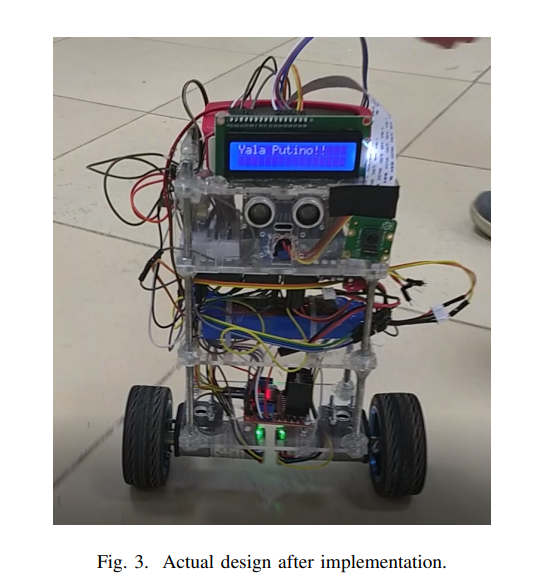
Over the past decade, mobile autonomous robots have been widely used efficiently for different applications. Recently, self-balancing robots attracted more attention and showed impressive performance. A self-balancing robot is simply a two-wheeled robot; hence it needs to be balanced vertically using a closed-loop control algorithm. In this paper, a new hybrid two-wheeled self-balancing robot is fully designed and implemented, which is able to track objects and to avoid obstacles efficiently. The proposed robot consists of a two-wheeled chassis equipped with an ultrasonic sensor, camera, gyroscope and accelerometer allowing a multi-directional navigation of the robot tracker. Additionally, the Internet of Things (IOT) framework has been used for remote control and monitoring via wireless interface. The Fuzzy Logic Controller is designed considering all the realistic hindrances in order to achieve high performance and meet robust stability. To approximate the position of an object about the robot, vision system and ultrasonic sensor coupled with a camera are used. Finally, it has been observed via simulation and hardware implementation the efficiency of fuzzy control technique which achieved both stability and robustness outcomes; however, due to processing restrictions other control techniques are also successfully implemented. Regarding the experimental results it can be concluded that, balancing and tracking techniques can be achieved by applying sequential algorithm in Simulink combined with vision system and sensors like ultrasonic, accelerometer and gyroscope. © 2020 IEEE.