
The effective antagonistic potential of plant growth-promoting rhizobacteria against Alternaria solani-causing early blight disease in tomato plant
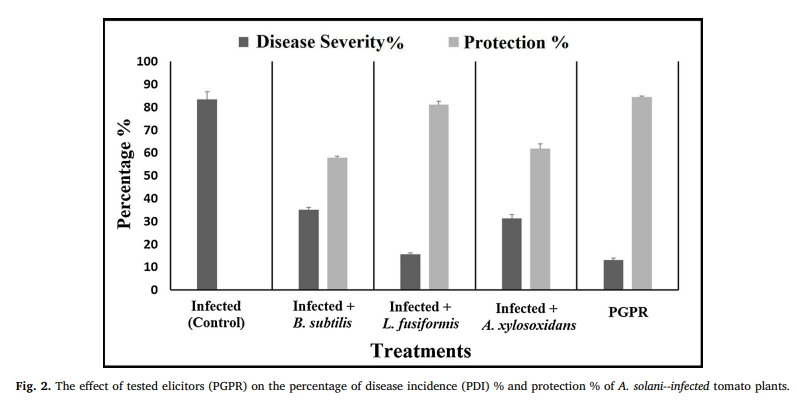
Tomato plants can be infected by several diseases, among them, the early blight disease, caused by the necrotrophic fungus Alternaria solani is very dangerous. Plant growth promoting rhizobacteria (PGPR) are enhanced the plant growth and suppress plant diseases. The current study was conducted in a pot experiment to investigate the bio-efficacy antagonistic bacterial isolates as either individual or combination against tomato early blight disease. Disease severity and protection percent, morphological indicators as well as yield characters were recorded. In vitro antagonistic activity assay of

Modeling and control of 3-omni wheel Robot using PSO optimization and Neural Network
Omni mobile robots are one of the mobile robots that interact with humans in many areas where it is needed to be collaborative and accurate. Committing robotics with artificial intelligence-based controllers became nowadays mandatory for more association of these robots with distinct environments. This paper proposes the distinction of the 3WD Omni Vision feedback model between Simscape and actual information to obtain a surmised model. Study applying some artificial control procedures on this model for path planning and speed control as the artificial neural system and PSO optimization

Active Morphing Control of Airfoil At Low Reynolds Number Using Level-Set Method
The active control of flow around an airfoil through morphing is numerically investigated. The lock-in phenomenon was predicted while using a fixed grid. Galerkin/Least-Squares Finite Element Method was used to simulate incompressible flow over an airfoil with leading edge morphing at a Reynolds number, Re = 5000, and angle of attack, α = 6°. The numerical simulation was carried out using the in-house FORTRAN code. The code was validated with the literature by simulating the flow over an oscillating cylinder. The paperwork implemented a locally oscillating surface on the airfoil with a
Self-Driving Car Lane-keeping Assist using PID and Pure Pursuit Control
Detection of lane boundaries is the primary role for monitoring an autonomous car's trajectory. Three lane identification methodologies are explored in this paper with experimental illustration: Edge detection, Hough transformation, and Birds eye view. The next step after obtaining the boundary points is to add a regulation rule to effectively trigger the regulation of steering and velocity to the motors. A comparative analysis is made between different steering controllers like PID or by using PID with a pure pursuit controller for the Lane Keeping Assist (LKA) system. A camera that sends

A Neuro-Fuzzy Based Approach for Energy Consumption and Profit Operation Forecasting
In recent years, the massive growth in the scale of data is being a key factor in the needed data processing approaches. The efficiency of the algorithms of knowledge extraction depends significantly on the quality of the raw data, which can be improved by employing preprocessing techniques. In the field of energy consumption, the forecasting of power cost needed plays a vital role in determining the expected profit. To achieve a forecasting with higher accuracy, it is needed to deal with the large amount of data associated with power plants. It is shown in the literature that the use of
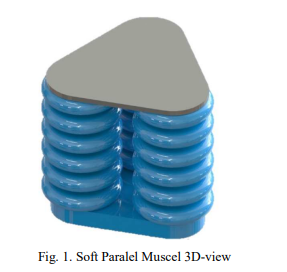
Design and FEA-based Methodology for a Novel 3 Parallel Soft Muscle Actuator
Recently, soft robotics represents a new era of advanced robotics systems. Based on the flexible nature of soft robots, they are more adequate to have safe interaction with humans and handle complex or delicate objects. Due to the nature of soft robotics, there is a crucial need to propose new designs, fabrication, and control systems suitable for the flexibility nature. In this research project, a novel three parallel soft muscle actuator is proposed. The proposed design and analytical models for predicting actuation behavior are based on a set of design parameters. First, the actuator
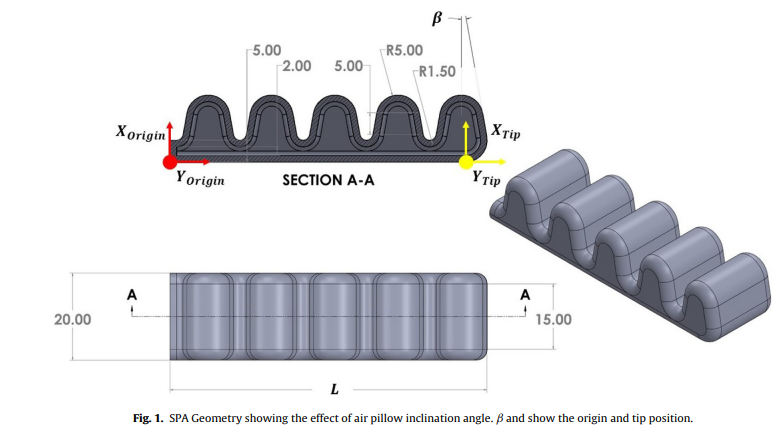
Design and implementation of variable inclined air pillow soft pneumatic actuator suitable for bioimpedance applications
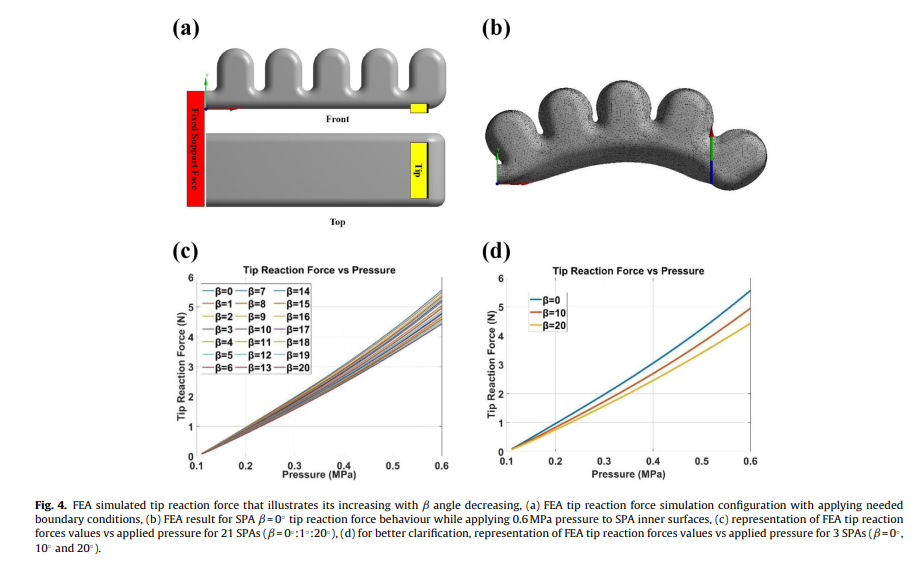
The technological revolution has caused the modernization of human–machine relationship changing our approach in problem solving our society issues and deviated the science of robotic all together. An example for one of the most important pawn in this revolution is soft robotics, the soft robots are robots that are made of deformable materials that provide an alternative approach to rigid robots. The soft pneumatic actuator (SPA) is one of the most widely used and studied form of this type of robotics. In this study, a new geometrical parameter of the SPAs is introduced by studying the effect
Theoretical and experimental investigation study of data driven work envelope modelling for 3D printed soft pneumatic actuators
In the last decade, soft robotics is considered one of the most widely researched fields in robotics, as it has many advantages and more versatile use than rigid robotics. Soft robots are flexible, which enable them to metaphorically complex designs, enabling them to imitate the movement of living things. In this article, the use of regression models with finite element analysis (FEA) data is compared with neural network (NN) models trained on visual feedback data. The effect of the soft pneumatic actuator (SPA) air pillow inclination angle (β) under positive and vacuum pressure on the
Hybrid Self-Balancing and object Tracking Robot Using Artificial Intelligence and Machine Vision
Over the past decade, mobile autonomous robots have been widely used efficiently for different applications. Recently, self-balancing robots attracted more attention and showed impressive performance. A self-balancing robot is simply a two-wheeled robot; hence it needs to be balanced vertically using a closed-loop control algorithm. In this paper, a new hybrid two-wheeled self-balancing robot is fully designed and implemented, which is able to track objects and to avoid obstacles efficiently. The proposed robot consists of a two-wheeled chassis equipped with an ultrasonic sensor, camera

Metaheuristic Optimization of Fractional Order Incremental Conductance (FO-INC) Maximum Power Point Tracking (MPPT)
This paper seeks to improve the photovoltaic (PV) system efficiency using metaheuristic, optimized fractional order incremental conductance (FO-INC) control. The proposed FO-INC controls the output voltage of the PV arrays to obtain maximum power point tracking (MPPT). Due to its simplicity and efficiency, the incremental conductance MPPT (INC-MPPT) is one of the most popular algorithms used in the PV scheme. However, owing to the nonlinearity and fractional order (FO) nature of both PV and DC-DC converters, the conventional INC algorithm provides a trade-off between monitoring velocity and